Caso de usuario: Uso de MapleSim para mecatrónica y control en UCLA
- Detalles
- Categoría: MapleSim
- Visto: 3593
DesafíoEn la Universidad de California en Los Ángeles (UCLA), el Laboratorio de Mecatrónica y Control realiza investigaciones en una variedad de aplicaciones basadas en control, que incluyen mecanización, control de motores y nanoposicionamiento. Buscaban herramientas de software que les dieran una mejor comprensión dinámica de sus sistemas, con el fin de desarrollar controladores más precisos e iterar en su desarrollo más rápido que antes. SoluciónEl equipo del laboratorio de investigación eligió MapleSim para su análisis dinámico, proporcionándoles modelos precisos a nivel de sistema que podrían servir como bancos de prueba tanto para el desarrollo de controles como para fines educativos. ResultadoAl utilizar MapleSim, el equipo pudo avanzar en su desarrollo y comprensión para una variedad de sus proyectos de control y mecatrónica. En algunas situaciones, MapleSim brindó la capacidad de explorar la dinámica de su máquina y evaluar las estrategias de control más rápido, y para otras aplicaciones, el equipo usó MapleSim para enseñar mejor los conceptos de control a sus estudiantes usando modelos interactivos. |
En casi todos los aspectos de la vida de hoy existen tecnologías nuevas y complejas para mejorar nuestra calidad de vida. Si bien estas tecnologías pueden ser muy diferentes, a menudo comparten un solo origen: laboratorios de investigación en instituciones académicas. Estos laboratorios, como el Laboratorio de Mecatrónica y Control de la UCLA, desarrollan y perfeccionan nuevas tecnologías para aplicaciones futuras en todas las industrias.
Como director del Laboratorio de Mecatrónica y Control, el profesor Tsu-Chin Tsao ayuda a guiar la investigación de su equipo, que consiste principalmente en aplicaciones basadas en control para mecanizado de precisión, control de motores y nanoposicionamiento. Para el diseño y control de maquinaria precisa, las herramientas basadas en simulación proporcionan información clave sobre cómo funcionará la máquina en diversas condiciones de funcionamiento. Mejores datos de simulación tienen un impacto directo en la facilidad y precisión con que se pueden desarrollar estrategias de control.
Como parte de su gestión de investigación y educación, el equipo adoptó recientemente MapleSim, la herramienta de simulación y modelado de Maplesoft, para crear modelos dinámicos de sus proyectos de investigación. Con estos modelos dinámicos de MapleSim, el equipo podría investigar más fácilmente cómo se comportarían sus productos en diferentes circunstancias. Los resultados de la simulación han ayudado al equipo a desarrollar mejores estrategias de control para varios proyectos y han servido como una herramienta educativa eficaz para demostrar conceptos a sus estudiantes. A continuación se destacan tres proyectos diferentes, que describen su desarrollo y prueba con MapleSim.
Control de aprendizaje iterativo de manipuladores de robots
El seguimiento de la trayectoria de los manipuladores de robots es una tecnología crítica en varias industrias, ya que tiene aplicaciones en muchos procesos de fabricación, como corte por láser, soldadura, pulido y dispensación de pegamento. La naturaleza repetida de estas tareas hace que el control de aprendizaje iterativo (cuyas siglas en inglés son ILC), una estrategia que utiliza información de ensayos previos para mejorar ensayos posteriores, sea una técnica prometedora para mejores estrategias de control. La mayoría de los robots industriales utilizan motores con engranajes por su bajo coste, alto par motor y tamaños compactos. Como consecuencia del uso de motorreductores, el par externo cambiante se mitiga con la reducción del engranaje, lo que permite al equipo modelar la manipulación como un sistema de entrada única y salida única (SISO).
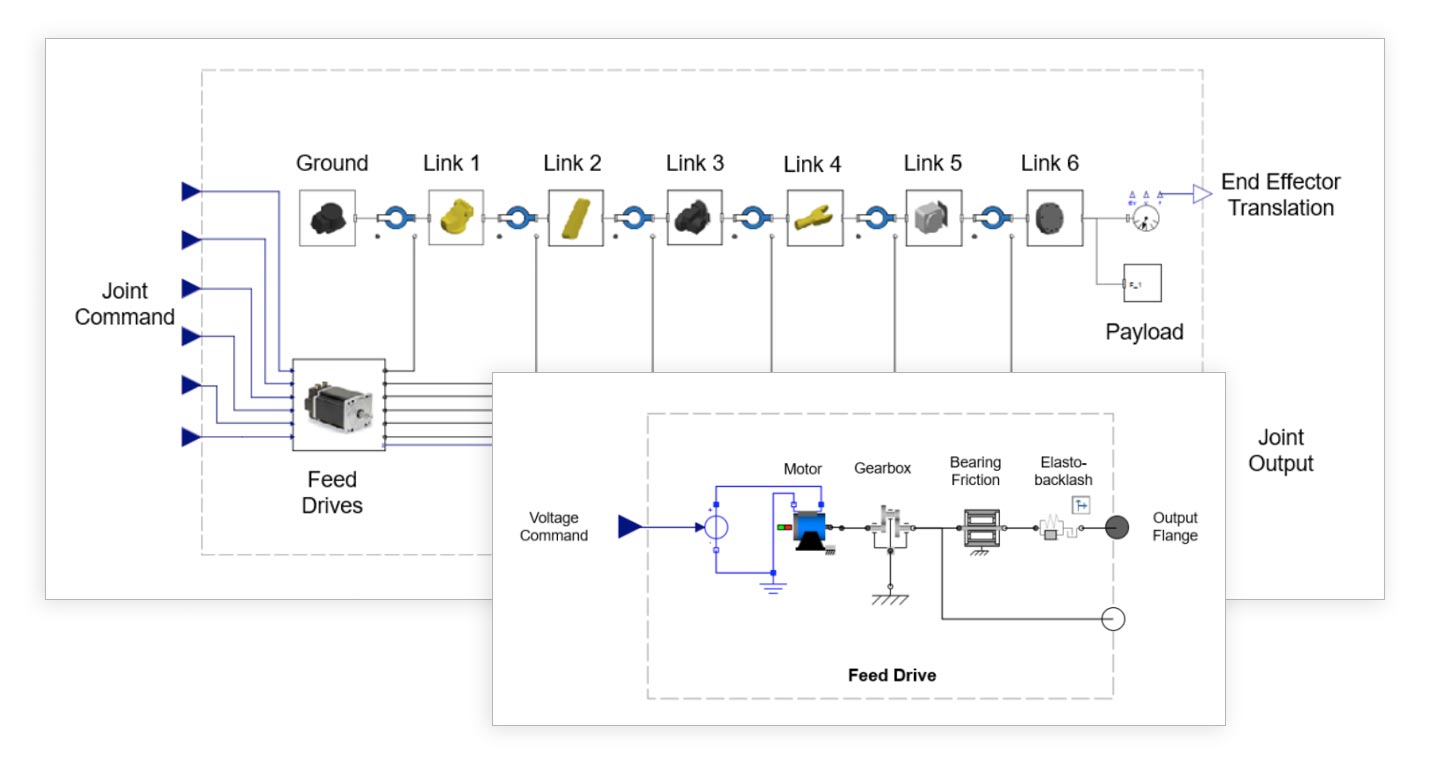
Figura 1: El modelo MapleSim para el manipulador de robot RH-12, que muestra tanto el modelo multicuerpo como el diseño de un único subsistema Feed Drive.
En este estudio, el equipo evaluó si se podría aplicar una estrategia de ILC para mejorar el desempeño de seguimiento y control [1]. Para acelerar la velocidad de convergencia y reducir las iteraciones requeridas, se desarrolló un modelo dinámico que utiliza datos cinemáticos inversos para proporcionar al controlador datos de entrada. El algoritmo desarrollado se probó en un modelo de manipulador de robot de 6 grados de libertad (DOF) construido en MapleSim (Figura 1) . Utilizando el modelo dinámico de MapleSim, el equipo también investigó el algoritmo ILC en escenarios comunes que impactan el movimiento del robot, como la elasticidad de las articulaciones, la fricción y el juego de engranajes. El equipo comparó los datos de ILC con un diseño típico que no era de ILC y encontró mejoras significativas utilizando sus algoritmos de ILC (Figura 2).
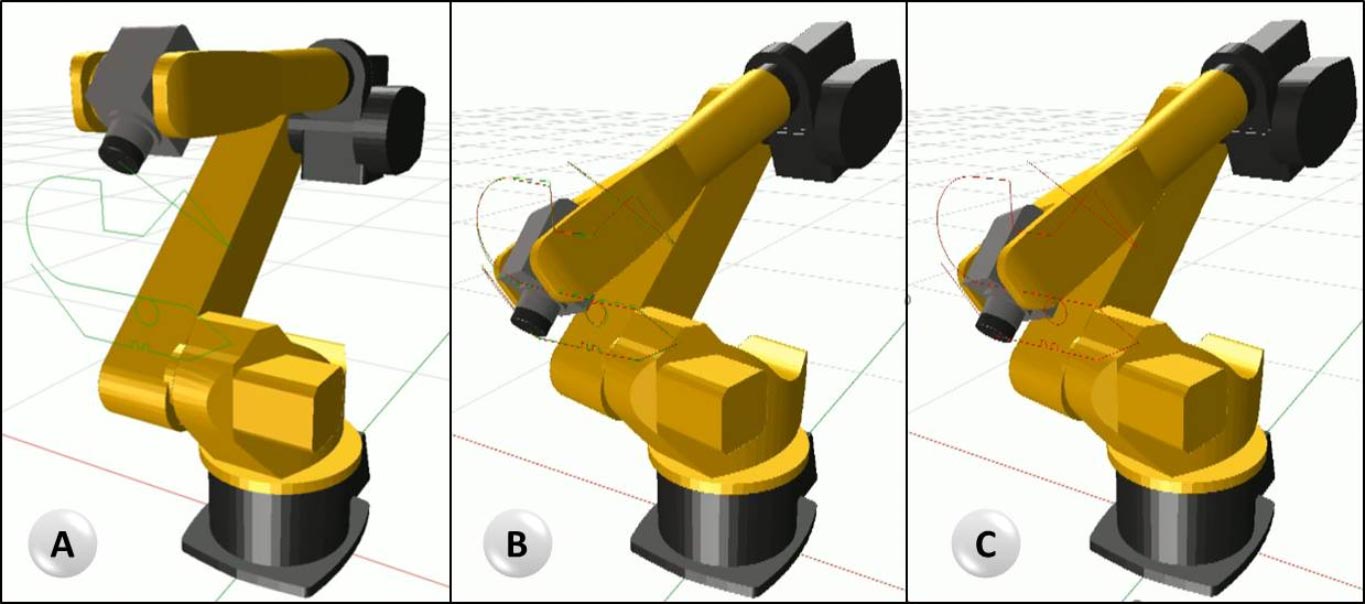
Figura 2: Resultados del rendimiento de seguimiento de PID de línea base en comparación con el rendimiento de seguimiento de ILC, donde (A) es la ruta de referencia, (B) es la ruta del controlador PID original con desviaciones (rojo) y (C) es la ruta del algoritmo ILC con casi ninguna desviación distinguible de la ruta de referencia.
Sistema robótico para televigilancia y formación en cirugía laparoscópica
El LapaRobot se introdujo como una plataforma para ayudar a los alumnos a desarrollar de forma segura las habilidades específicas necesarias para la cirugía laparoscópica, que utiliza cables de fibra óptica insertados en la pared abdominal con gran precisión [2]. El sistema LapaRobot se compone de una estación experta y una estación de aprendices que están conectadas a través de una conexión a Internet. Los actuadores integrados permiten que un cirujano experto maneje la estación del aprendiz para que el aprendiz aprenda la técnica adecuada a través de la retroalimentación física. La trayectoria de la herramienta quirúrgica y la transmisión de video pueden ser grabados y luego reproducidos por un aprendiz para perfeccionar sus habilidades a través de la repetición guiada sin la necesidad de supervisión experta. El sistema está diseñado para crear una aproximación de alta fidelidad del espacio de trabajo quirúrgico, incorporar instrumentos quirúrgicos disponibles comercialmente, y proporcionar una gran cantidad de datos de alta resolución para análisis cuantitativos y feedback.
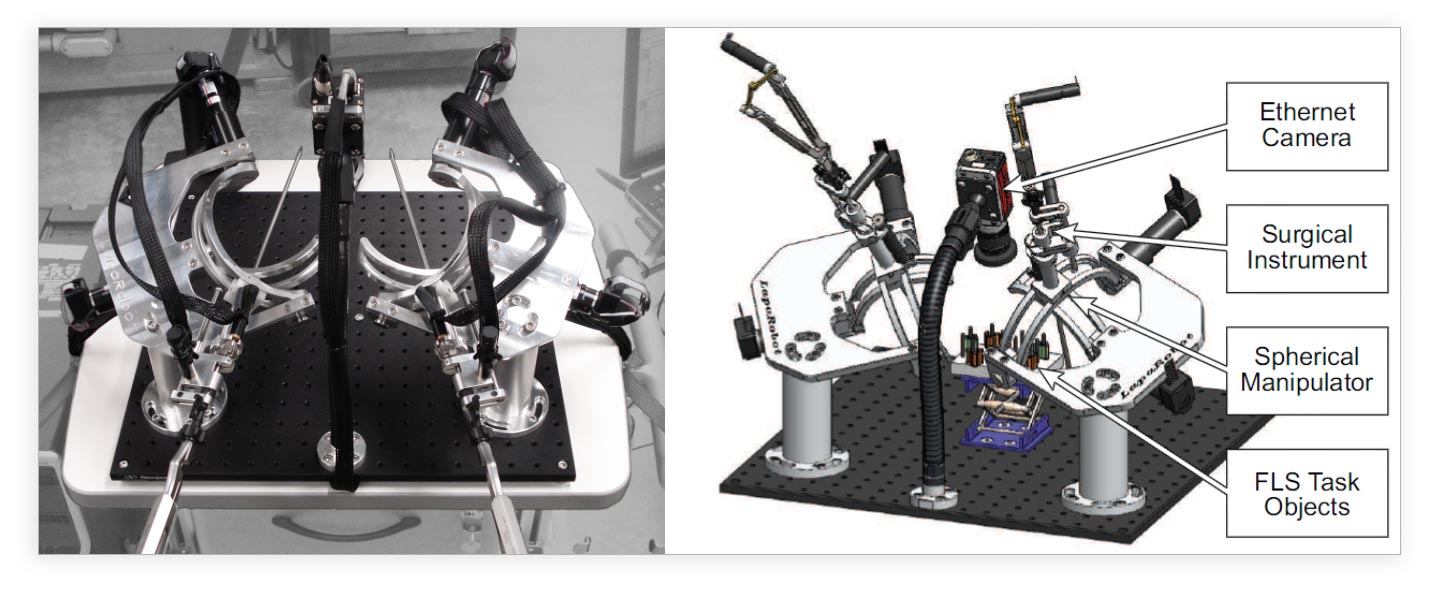
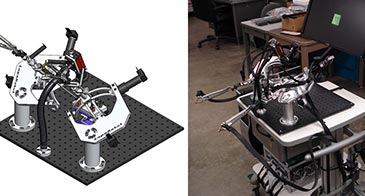
Figura 3: El sistema quirúrgico LapaRobot (izquierda) y el modelo CAD que describen varios aspectos del diseño (derecha).
El modelo cinemático se construyó en MapleSim para evaluar los requisitos de diseño, como el rango de movimiento. Utilizando MapleSim CAD Toolbox , la información CAD de LapaRobot se importó a MapleSim y los componentes se conectaron entre sí con juntas revolucionarias y prismáticas (Figura 4) . Con este modelo, la información de rango de movimiento podría extraerse bajo una variedad de condiciones de operación. Se pueden incorporar otras propiedades, como la inercia, la dinámica del motor y la fricción, para simular mejor la dinámica general del sistema y facilitar el diseño de mejores algoritmos de control.
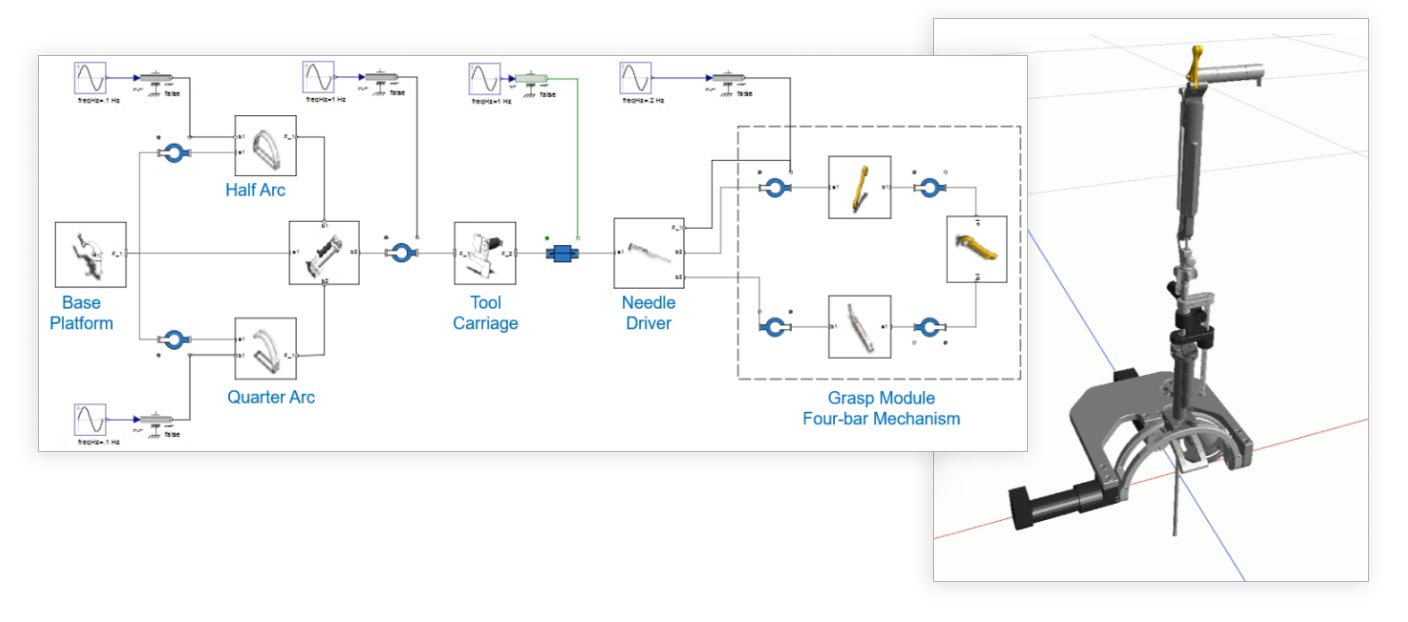
Figura 4: El diseño del componente se ve en el modelo MapleSim (izquierda), y el brazo derecho del modelo se ve en la ventana de resultados de simulación 3D de MapleSim (derecha).
Un novedoso cuadricóptero multirrotor de giro e inclinación
Se desarrolló un novedoso sistema de cuadrotor basado en los resultados de simulación dinámica de MapleSim [3]. Cada hélice de este cuadrotor consta de dos juntas de rotación adicionales, que brindan capacidades de giro e inclinación a la pala de la hélice y permiten que cada hélice genere empuje en múltiples direcciones (Figura 5) . El quadrotor tiene 12 grados de libertad (DOF) y está sobreactivado en un espacio tridimensional para proporcionar un mayor control. En comparación con los cuadrotores tradicionales con poca activación, el cuadrotor con giro e inclinación es capaz de seguir las trayectorias mientras mantiene la orientación deseada, lo que proporciona una mayor flexibilidad durante el movimiento con una mejor eficiencia energética.
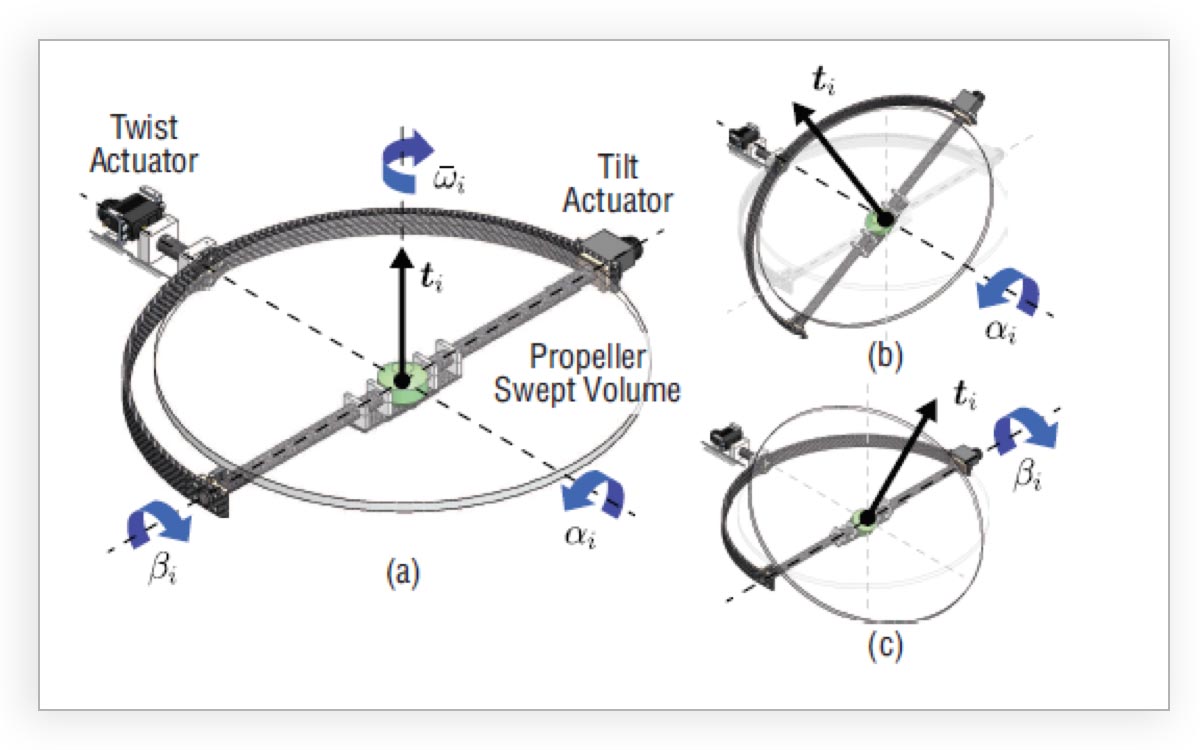
Figura 5: La configuración de una sola hélice, destacando los actuadores de giro e inclinación.
Con MapleSim, se evaluó la dinámica de cada componente individual en el cuadrotor con resultados de simulación. La dinámica de los servomotores conjuntos y los motores de hélice se incluyen en el modelo, y se agregaron sensores de locomoción para el sistema cuando fue necesario. El modelo completo de MapleSim se exportó luego como un bloque de función S de Simulink utilizando el conector MapleSim para desarrollar los algoritmos de control. Para probar el sistema, se colocó una sonda de contacto debajo del quadrotor para proporcionar retroalimentación de la fuerza de contacto. Con esta retroalimentación, se simuló el rendimiento del cuadrotor durante tareas de inspección simples en diferentes superficies (Figura 6).
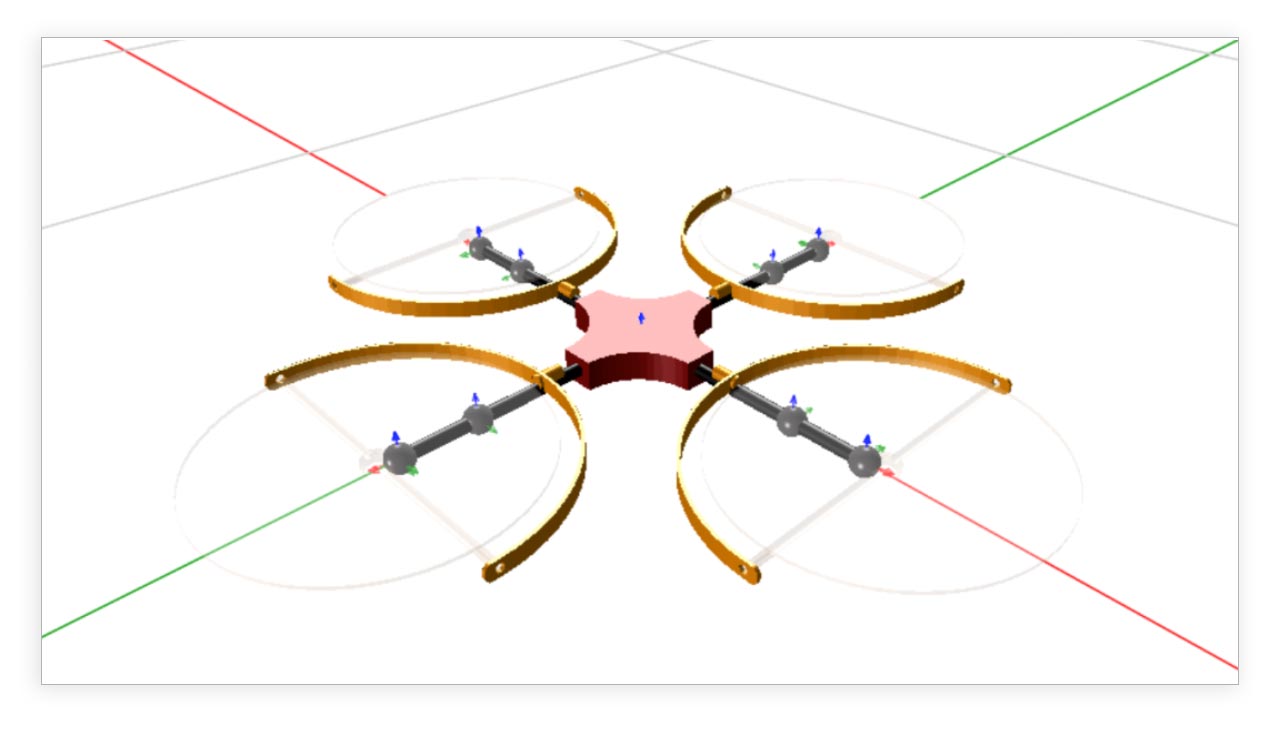
Figura 6: El modelo 3-D en MapleSim, utilizado para visualizar el rendimiento del cuadrotor durante varias simulaciones.
Avanzando
Mediante el uso de MapleSim, el profesor Tsao y su equipo han desarrollado nuevos métodos para desarrollar, probar y capacitar dentro del Laboratorio de Mecatrónica y Control de UCLA. Estos proyectos se han beneficiado de diferentes características de MapleSim, desde capacidades de visualización hasta modelos de conectividad de exportación, y han ayudado a los objetivos de investigación y educación del laboratorio. Visite el sitio web del profesor Tsao para conocer más sobre los proyectos en curso en el Laboratorio de Mecatrónica y Control.
Referencias
- Lee, Yu-Hsiu, et al. "A Nested-Loop Iterative Learning Control for Robot Manipulators." IFAC-PapersOnLine 52.15 (2019): 358-363.
- Prince, Stephen W., et al. "A Robotic System for Telementoring and Training in Laparoscopic Surgery." The International Journal of Medical Robotics and Computer Assisted Surgery (2019).
- Gerber, Matthew J., and Tsu-Chin Tsao. "Twisting and Tilting Rotors for High-Efficiency, Thrust-Vectored Quadrotors." Journal of Mechanisms and Robotics 10.6 (2018): 061013.