Estudio de caso de usuario: Control de vibración de un robot de almacenamiento con cable
- Detalles
- Categoría: MapleSim
- Visto: 2131

DesafíoAl diseñar robótica para aplicaciones de alta velocidad en espacios de trabajo grandes, el movimiento y las vibraciones se vuelven cada vez más difíciles de controlar con precisión. Como parte del Laboratorio de Robótica de Alta Velocidad de la Universidad de Waterloo, el Dr. Hamed Jamshidifar investiga tecnologías que pueden ayudar en el desarrollo de nuevas tecnologías robóticas. En un proyecto reciente, el Dr. Jamshidifar necesitaba nuevas técnicas para controlar con precisión el movimiento de un robot de cable de almacenamiento. Las técnicas de modelado que necesitaba debían tener en cuenta la dinámica compleja de los sistemas de cable que se encuentran en un sistema robótico de este tipo. SoluciónEl Dr. Jamshidifar utilizó MapleSim, la herramienta de modelado y simulación de Maplesoft, para desarrollar un modelo dinámico del robot de almacenamiento por cable. Al utilizar la biblioteca dedicada a cuerdas y poleas de MapleSim, pudo construir un modelo que pudiera reflejar con precisión el movimiento del robot y sus vibraciones no deseadas. Con un modelo suficientemente detallado en MapleSim, el Dr. Jamshidifar pudo desarrollar y probar estrategias de control para controlar las vibraciones y oscilaciones que se producen durante los movimientos del robot y la interacción con su entorno. ResultadoAl utilizar el modelo desarrollado en MapleSim, el Dr. Jamshidifar demostró con éxito una solución basada en simulación para controlar las vibraciones del robot. El modelo se creó a partir de un prototipo de robot a pequeña escala para validar la precisión, y las simulaciones mostraron la presencia de vibraciones no deseadas. Estas vibraciones se redujeron significativamente con las estrategias de control implementadas en MapleSim. El Dr. Jamshidifar seguirá utilizando los modelos de MapleSim para controlar y minimizar las vibraciones a medida que estos robots se incorporen a futuras aplicaciones comerciales. |
En los campos de la automatización industrial y el diseño de robótica, los desafíos de ingeniería se presentan en todas las etapas de desarrollo. Las máquinas suelen estar diseñadas para funcionar lo más rápido posible, ya que la velocidad es uno de los factores clave en la eficiencia de un entorno industrial. Sin embargo, el aumento de la velocidad de estas máquinas genera problemas nuevos y complejos que resolver. Cuando las máquinas funcionan a altas velocidades, los cambios tanto en la dirección como en la velocidad pueden provocar fuerzas significativas en los componentes de la máquina. Sin las estrategias de control adecuadas para máquinas de alta velocidad, los ingenieros corren el riesgo de dañar los componentes de la máquina, poniendo en peligro la seguridad tanto de la máquina como de los operadores cercanos.
Como parte del Laboratorio de Robótica de Alta Velocidad de la Universidad de Waterloo, el Dr. Hamed Jamshidifar investiga tecnologías que pueden ayudar en el desarrollo de nuevas tecnologías robóticas. Utiliza el modelado y la simulación como una estrategia clave para comprender mejor la dinámica de la robótica de alta velocidad. En un proyecto reciente, estaba estudiando la dinámica de un robot de almacenamiento de alta velocidad con cable. Estos robots están destinados a su uso en almacenes, donde los productos deben trasladarse por grandes espacios de trabajo a alta velocidad. Al aprovechar los sistemas de cable para mover el robot entre ubicaciones, el diseño del Dr. Jamshidifar puede proporcionar un funcionamiento más rápido que los robots de almacenamiento tradicionales.
Para alcanzar las altas velocidades posibles con el nuevo diseño del robot, el control del movimiento y la vibración sería una parte crucial del proceso de diseño. Sin controladores de alta fidelidad, el robot accionado por cable sería fácilmente susceptible a vibraciones no deseadas y otros movimientos no deseados que impedirían el rendimiento y podrían dañar los motores de accionamiento y el entorno circundante. El Dr. Jamshidifar eligió MapleSim, la herramienta de modelado y simulación de Maplesoft, como una tecnología clave para comprender la dinámica del robot y desarrollar sistemas de control que pudieran minimizar y controlar las vibraciones con precisión. Si bien existen otras herramientas de modelado y simulación, MapleSim ofrece una biblioteca dedicada a cuerdas y poleas que le permitió incorporar fácilmente la dinámica de los cables en sus simulaciones.
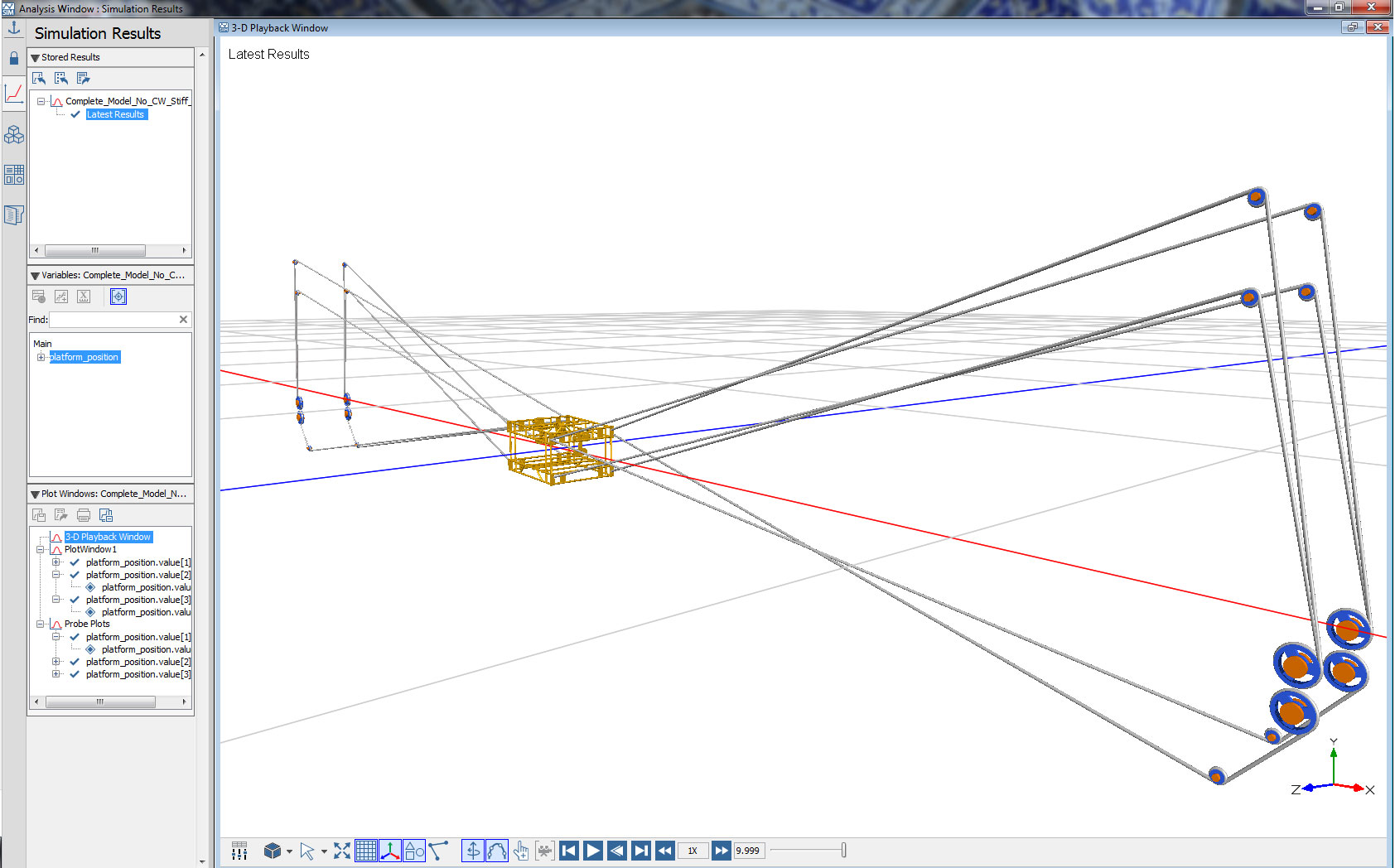
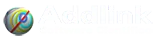
Figura 1: Una visualización 3D del modelo del Dr. Jamshidifar en MapleSim.
Para crear el modelo del robot en MapleSim, el Dr. Jamshidifar importó su modelo CAD preexistente de la plataforma móvil del robot. Al importar su modelo CAD, pudo importar automáticamente las geometrías de la plataforma, la información de masa e inercia y la información del modelo 3D para fines de visualización. Luego, el modelo se completó conectando componentes estándar de MapleSim, incluidas poleas, cabrestantes y cables. Para probar el modelo, los cabrestantes se accionaron mediante fuerzas simplificadas para simular el movimiento del robot a lo largo de una trayectoria de movimiento rectangular.
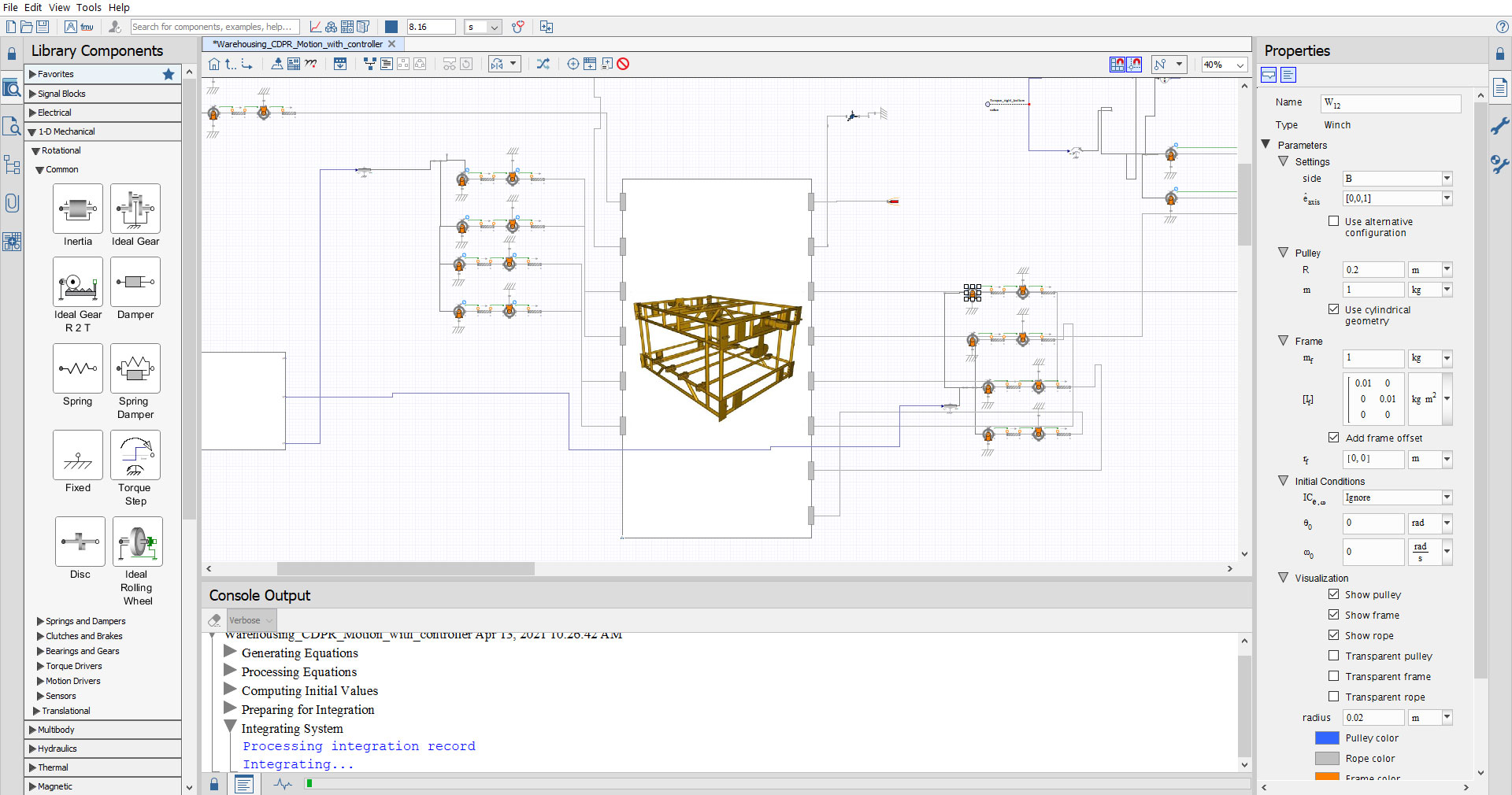
Figura 2: El modelo de robot de almacenamiento con cable en MapleSim, que muestra la plataforma central conectada a los sistemas de cable y cabrestante. Los parámetros del cabrestante se ven en el lado derecho del espacio de trabajo de MapleSim.
Para validar la precisión del modelo, los resultados de la simulación se compararon con un prototipo físico a pequeña escala que se había construido previamente. Esto garantizaría que la dinámica básica del modelo de MapleSim estuviera alineada con los resultados esperados durante la operación.
Figura 3: Un prototipo físico a pequeña escala del robot de almacenamiento accionado por cable.
Los resultados de la simulación del robot se pueden visualizar en MapleSim utilizando una representación en 3D de los sistemas de poleas en combinación con el CAD previamente importado. Los resultados iniciales de la simulación muestran las vibraciones problemáticas de la plataforma central. Sin un control de movimiento adecuado, estas vibraciones limitarían tanto la velocidad como la seguridad del funcionamiento del robot. El modelo de MapleSim se utilizaría para probar y validar varias estrategias de control para minimizar estas vibraciones, permitiendo al mismo tiempo las velocidades máximas de funcionamiento seguras.
El segundo conjunto de resultados de simulación muestra los resultados de una estrategia de control elemental para minimizar las vibraciones. El movimiento se comparó con los resultados anteriores, no controlados, y se mostró la cantidad de vibración que se eliminó durante el perfil de movimiento. Los resultados de simulación que se muestran son solo el producto de los intentos preliminares de reducir las vibraciones; el Dr. Jamshidifar tiene la intención de desarrollar estrategias de control y algoritmos que reducirán aún más las vibraciones en todas las condiciones de funcionamiento.
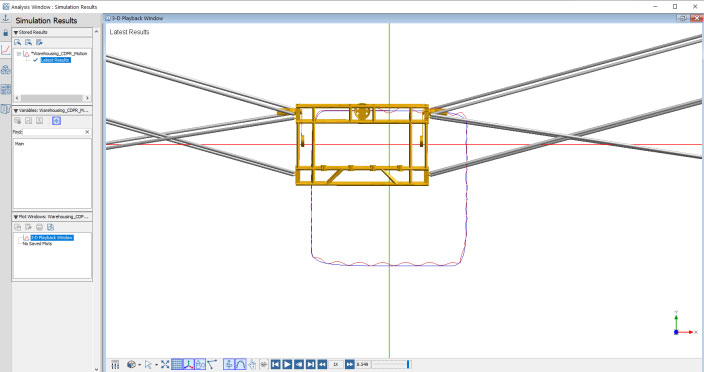
Figura 4: Resultados visuales de la vibración plana del modelo de robot de almacenamiento. Se traza la trayectoria del movimiento y se puede ver que oscila sin controladores de movimiento (izquierda), mientras que se muestra que los controladores de movimiento estabilizan el movimiento de la plataforma (derecha).
El Dr. Jamshidifar pudo demostrar que las vibraciones no deseadas en su robot de almacenamiento accionado por cable se podían minimizar con las estrategias de control correctas. Al continuar utilizando MapleSim para su investigación y desarrollo, podrá minimizar la posibilidad de problemas al desarrollar prototipos físicos, habiendo eliminado ya varios problemas en el modelo de MapleSim. A medida que continúa desarrollando el modelo del robot, el Dr. Jamshidifar planea utilizar sus modelos de MapleSim para desarrollar con precisión estrategias de control y algoritmos que puedan llevar robots más rápidos y mejores al mercado para aplicaciones de almacenamiento. El equipo ha desarrollado actualmente un prototipo a escala real, con planes de llevar el robot a los mercados comerciales en el futuro.
Figura 5: Un prototipo a escala real del robot de cable de almacenamiento.