COMSOL Multibody Dynamics Module 6.4
DESCRIPCIÓN
Extensión del módulo Structural Mechanics Module, que proporciona herramientas avanzadas para el diseño y optimización de modelos mecánicos multicuerpo utilizando el análisis de elementos finitos (Requiere COMSOL Multiphysics y Structural Mechanics Module).
CARACTERÍSTICAS
El módulo permite la simulación de un sistema mixto de cuerpos flexibles y rígidos, cada uno de los cuales puede estar sujeto a grandes desplazamientos rotacionales y translacionales.
SECTORES
Algunas de las principales aplicaciones del módulo pueden ser:
- Mecatrónica
- Robótica
- Biomecánica
- Dinámica de vehículos
- Dinámica de motores
- Instrumentos biomédicos
- Simulaciones dinámicas generales de montajes mecánicos
VERSIONES
6.4
NOVEDADES
6.4 introduce funcionalidades para el modelado de juntas y el modelado automático de contacto entre múltiples objetos.
Nueva interfaz de juntas
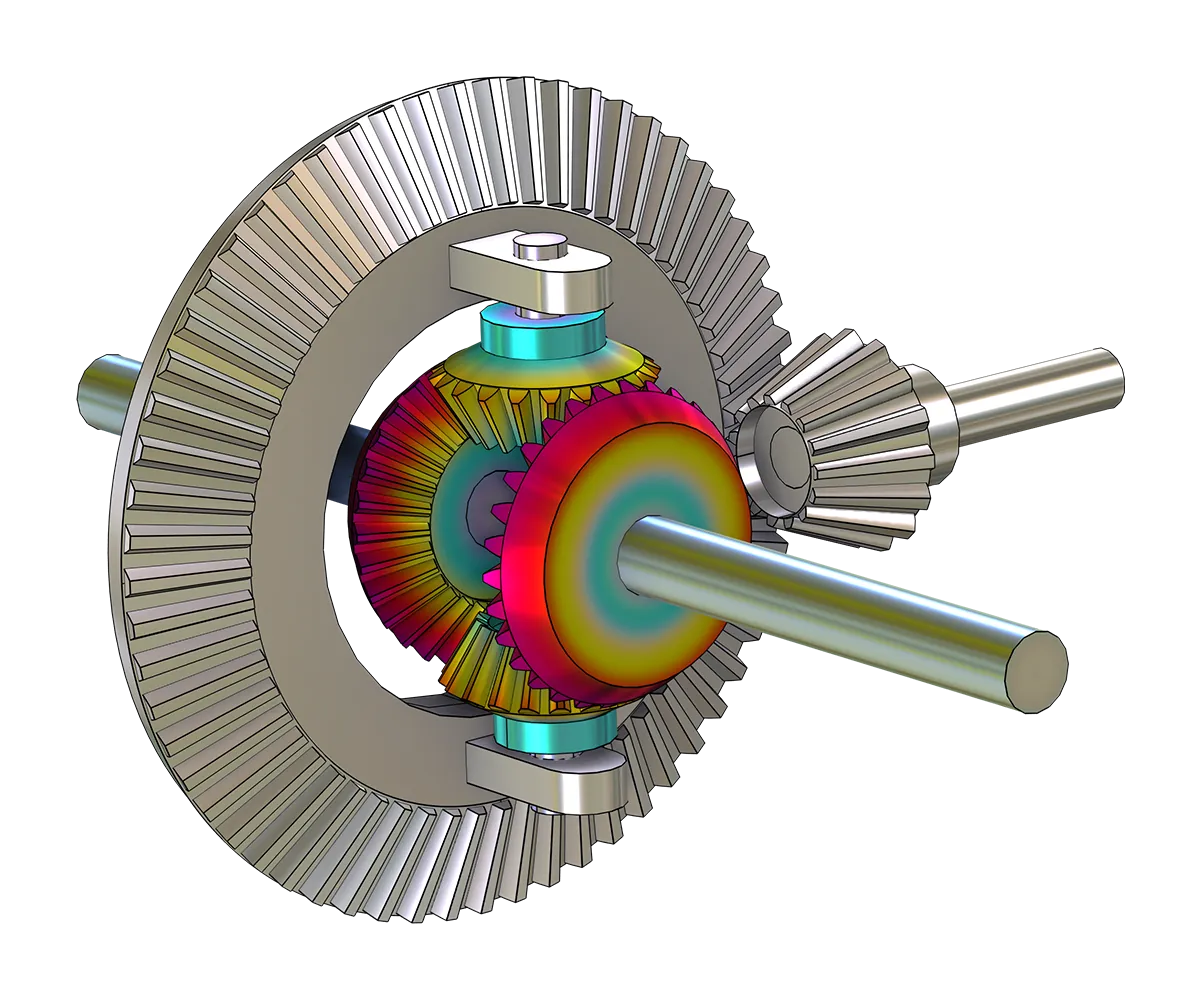
Se ha introducido una nueva interfaz Joints para analizar ensamblajes mecánicos conectados mediante diversos tipos de uniones. Los tipos de uniones disponibles, como bisagras, correderas y rótulas, son los mismos que los de la interfaz Multibody Dynamics. Esta incorporación agiliza el modelado de conexiones en las interfaces de Solid Mechanics, Shell y Beam. Resulta útil cuando no se requieren todas las funcionalidades de la interfaz de Multibody Dynamics. Consulte esta nueva funcionalidad en el modelo tutorial Door Slam Analysis.
La interfaz Joints se utiliza para añadir bisagras a un modelo construido con la interfaz de Mecánica de Sólidos.
Modelado automático de contactos con múltiples objetos
Para facilitar la creación de modelos con un gran número de posibles interacciones de contacto, se ha introducido un nuevo tipo de modelado de contacto que establece automáticamente las condiciones de contacto entre muchos objetos de forma arbitraria. El modelo de tutorial Objects Falling in a Box muestra esta nueva funcionalidad y la mejora significativa del flujo de trabajo.
Nuevos modelos de tutorial
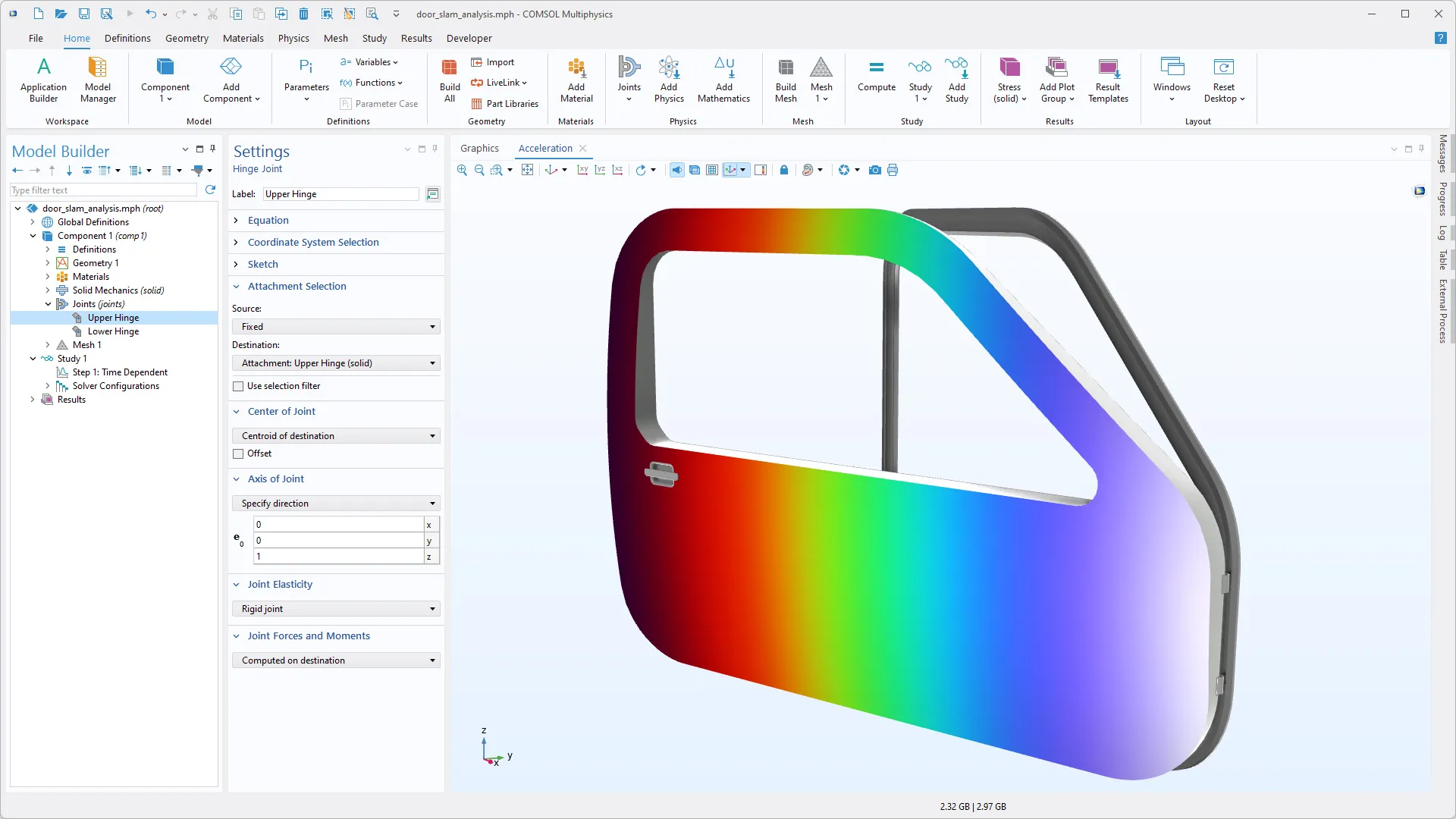
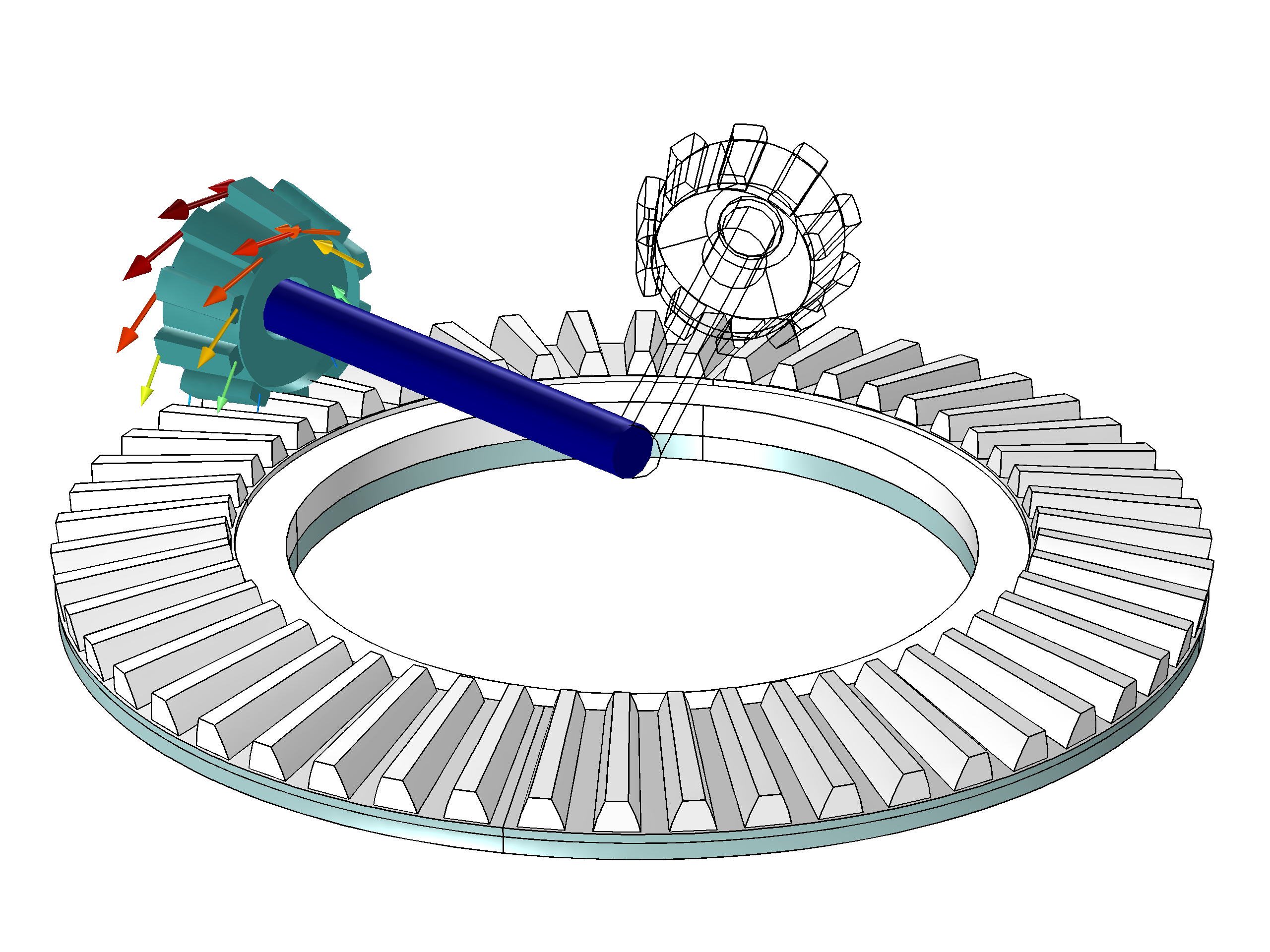
Relaciones de transmisión en un tren de engranajes planetarios
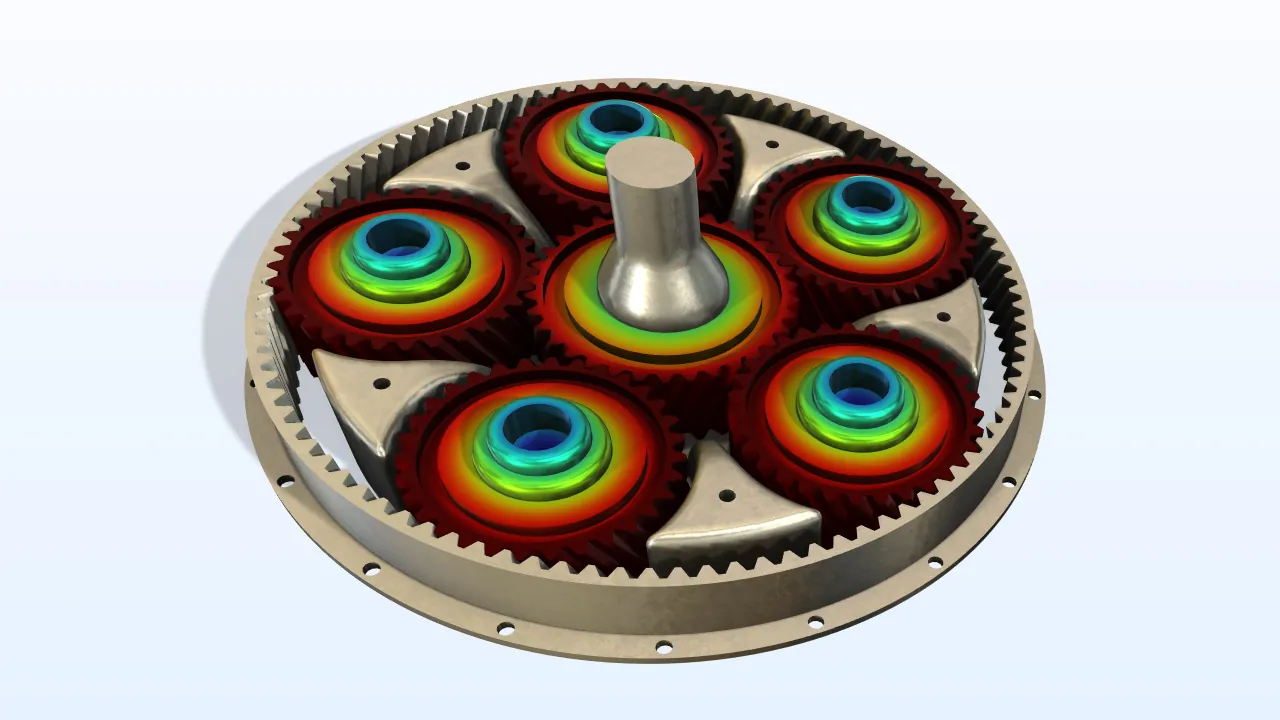
Desplazamientos en un tren de engranajes planetarios.
6.3
NOVEDADES
presenta nuevas funciones para modelar la fricción en una conexión leva-seguidor, nuevas características para prescribir la velocidad y la aceleración de cuerpos elásticos y funciones para medir valores relativos de cualquier cantidad entre dos puntos seleccionados. Lea más sobre estas actualizaciones a continuación.
Fricción en seguidores de leva
En los seguidores de leva, la pérdida por fricción que surge debido a la interacción entre la leva y las superficies del seguidor a menudo conduce a una pérdida de energía. El nuevo subnodo Friction debajo del nodo Cam-Follower se puede utilizar para modelar las pérdidas por fricción en un sistema seguidor de leva. La fuerza de fricción se modela utilizando una ley de fricción continua suave y numéricamente robusta que está disponible para estudios dependientes del tiempo.

La ventana Settings del nuevo subnodo Friction con un modelo que muestra el desplazamiento del sistema y la velocidad de la leva y la fuerza de fricción entre la leva y el seguidor.
Velocidad prescrita y aceleración prescrita
Ahora es posible especificar la velocidad o aceleración de un dominio elástico o un límite en una simulación multicuerpo mediante el uso de las nuevas funciones Prescribed Velocity y Prescribed Acceleration. Estas funciones se pueden utilizar para prescribir datos de velocidad o aceleración en una o más direcciones en estudios dependientes del tiempo y de la frecuencia. También se puede incluir la variación armónica de la cantidad prescrita en un análisis del dominio de frecuencia de tipo perturbación.
Medir valores relativos
En el caso de los sistemas multicuerpo, un nuevo nodo Measure facilita el cálculo del desplazamiento relativo, la velocidad, la aceleración o cualquier otra cantidad entre dos puntos seleccionados en un sistema de coordenadas determinado. Hay un conjunto de variables integradas disponibles en Result Templates para el posprocesado.
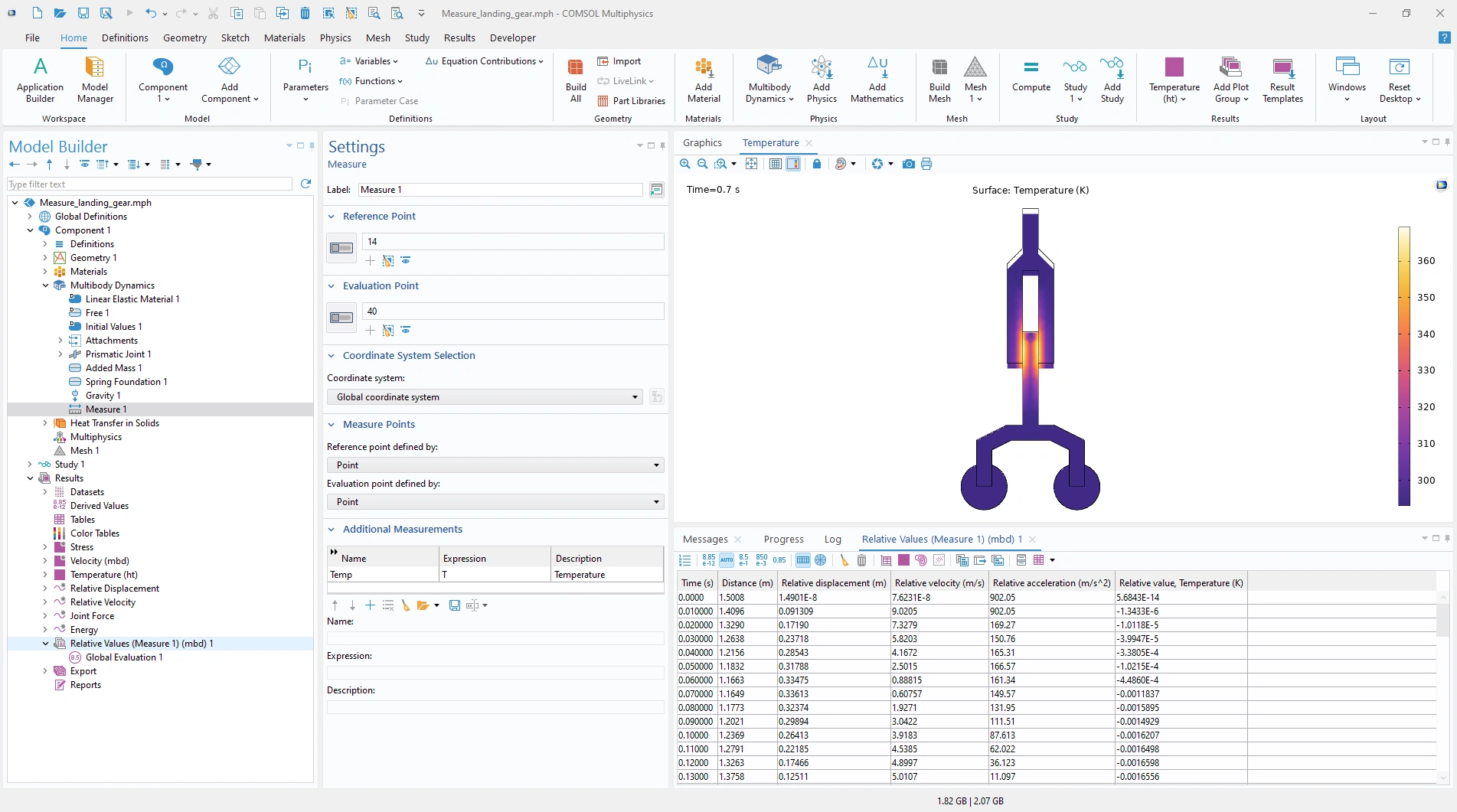
La ventana Settings para el nuevo nodo Measure, junto con las variables integradas disponibles para el posprocesado.
6.2
NOVEDADES
Interfaz multifísica para modelar la interacción magnético-estructura en maquinaria giratoria
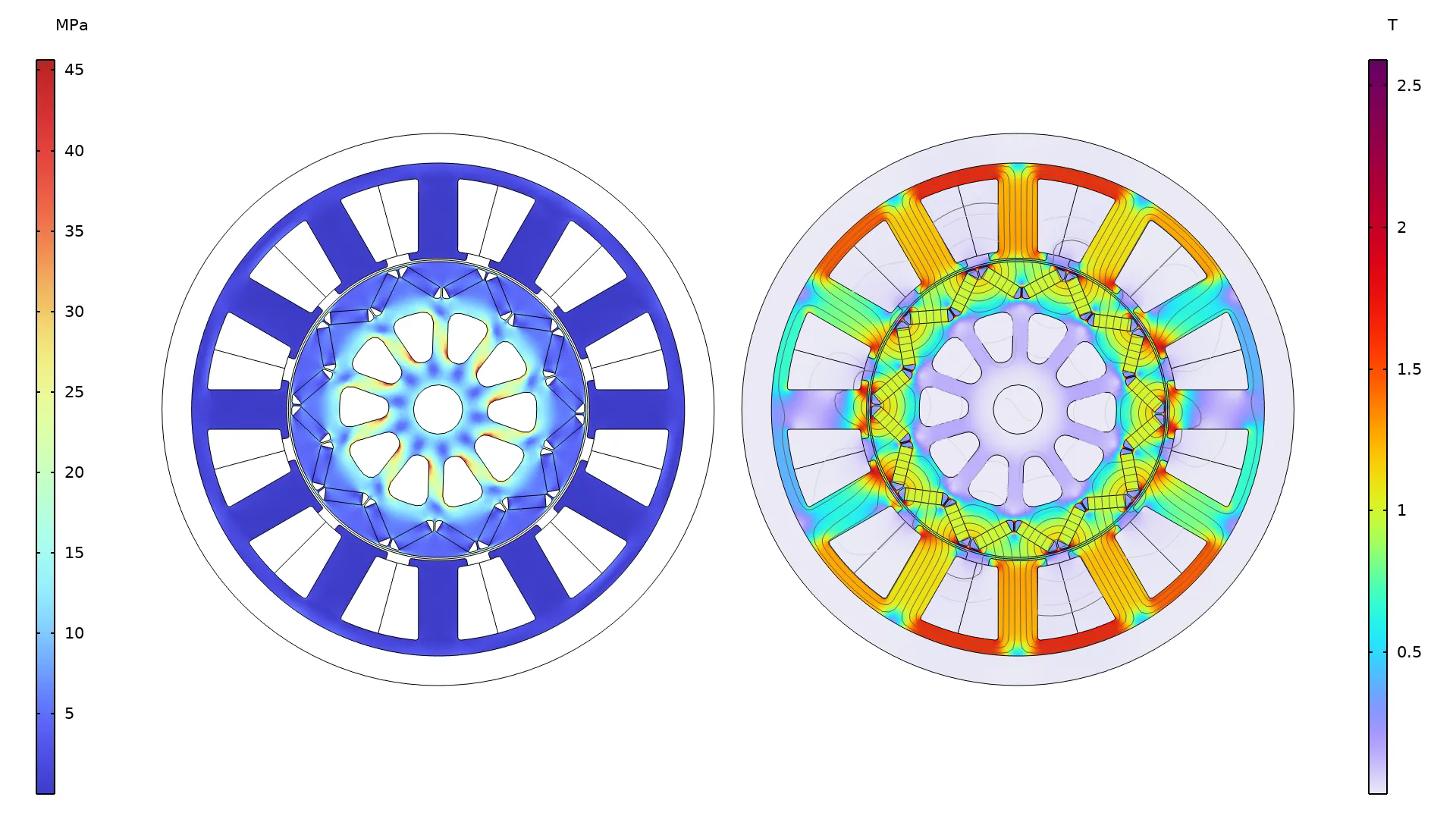
Una nueva interfaz Magnetic-Rigid Body Interaction in Rotating Machinery establece el acoplamiento necesario para estudiar la mecánica estructural y la dinámica de cuerpos rígidos en motores y generadores electromagnéticos giratorios. Esta interfaz combina una interfaz Multibody Dynamics con una interfaz Rotating Machinery, Magnetic a través del nuevo acoplamiento multifísico Magnetic Forces, Rotating Machinery. El acoplamiento conecta la física estructural y electromagnética a nivel de dominio y añade la carga sobre una estructura giratoria que es rígida o deformada debido a las tensiones de Maxwell. Esta funcionalidad se puede utilizar para calcular cómo se distribuyen las deformaciones y las tensiones originadas por las fuerzas del entrehierro tanto en el estator como en el rotor de un motor eléctrico (Los ejemplos de aplicaciones incluyen rodamientos magnéticos y rotores desequilibrados). Puede verse esta interfaz en el nuevo modelo tutorial Magnetic-Structure in a Permanent Magnet Motor. Téngase en cuenta que esta característica requiere el módulo AC/DC Module.
Restricciones radiales en juntas planas
Para uniones planas, la funcionalidad Constraints incluye una nueva opción para añadir restricciones radiales, donde se pueden establecer el centro y el radio del círculo de restricción. Con esta opción, se aplica una restricción radial al movimiento plano de un cuerpo, que es similar a colocar un círculo tope imaginario que restringe el movimiento del cuerpo a la dirección radial.
Análisis de relajación de inercia
El análisis de relajación de inercia es un tipo especial de análisis estático para estructuras no restringidas que son aceleradas por cargas externas, donde las cargas externas y las fuerzas de inercia de la estructura deben mantener un equilibrio de fuerzas dinámico. En todas las interfaces Structural Mechanics, se ha añadido una nueva funcionalidad Inertia Relief. Esta característica se puede utilizar para automatizar la configuración de una secuencia de estudio especial que calcula el campo de aceleración, las fuerzas de inercia correspondientes y las tensiones resultantes.
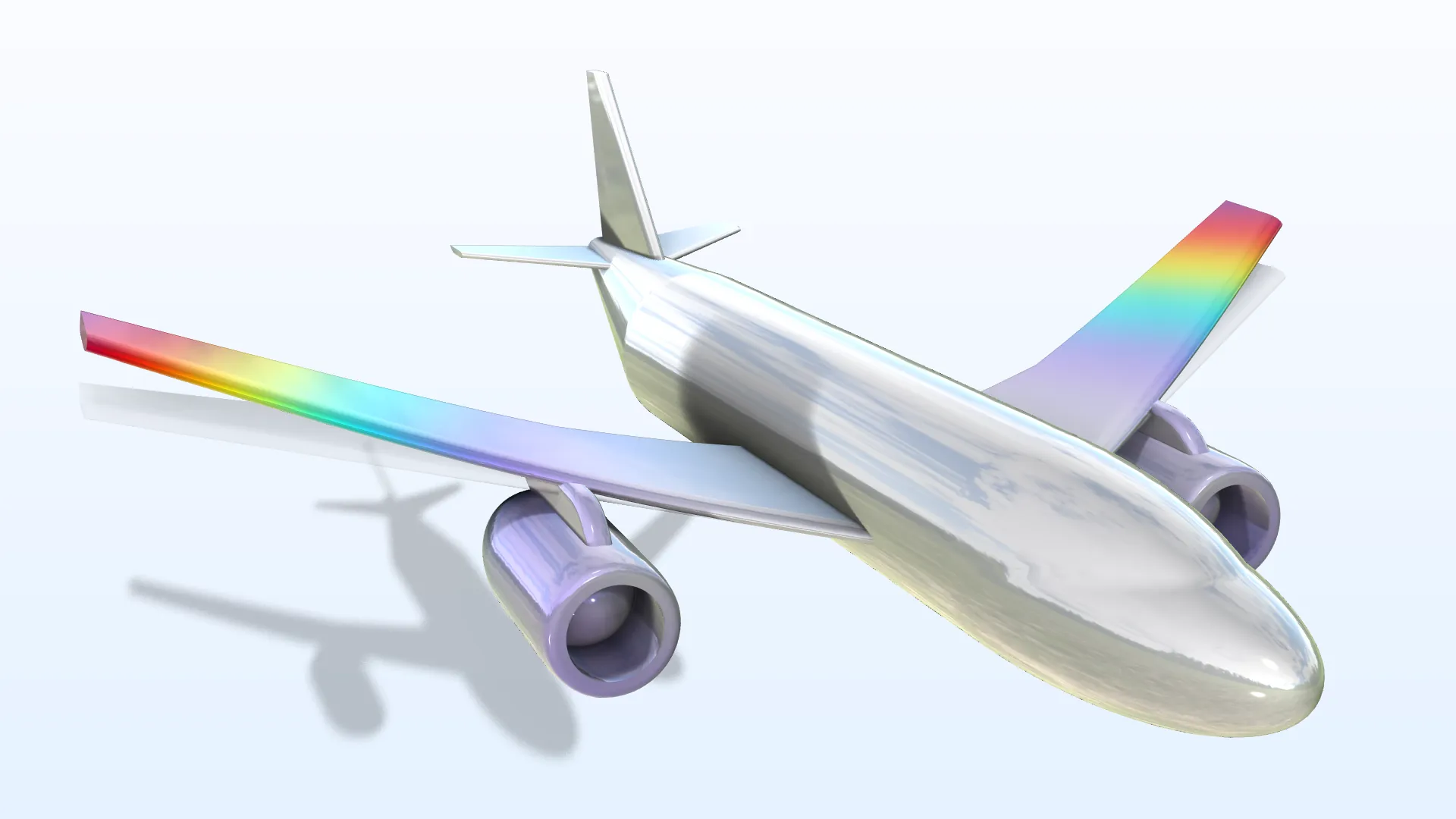
Deformaciones del ala de una aeronave durante una maniobra de enlairamiento.
Refuerzos incrustados
Cuando se utiliza el acoplamiento multifísico Embedded Reinforcement, ahora es posible incrustar elementos de una interfaz Wire en un dominio sólido flexible para que actúen como refuerzos. Además, con una licencia para el módulo Structual Mechanics Module, también es posible insertar elementos de borde de las interfaces Truss o Beam y elementos de superficie de la interfaz Membrane en un dominio modelado con la interfaz Multibody Dynamics. Esta nueva funcionalidad es útil al modelar estructuras como, por ejemplo, transmisiones por correa reforzadas con alambre. También se puede utilizar para modelar la desunión entre el elemento incrustado y el sólido circundante, donde la conexión puede ser completamente rígida o flexible.
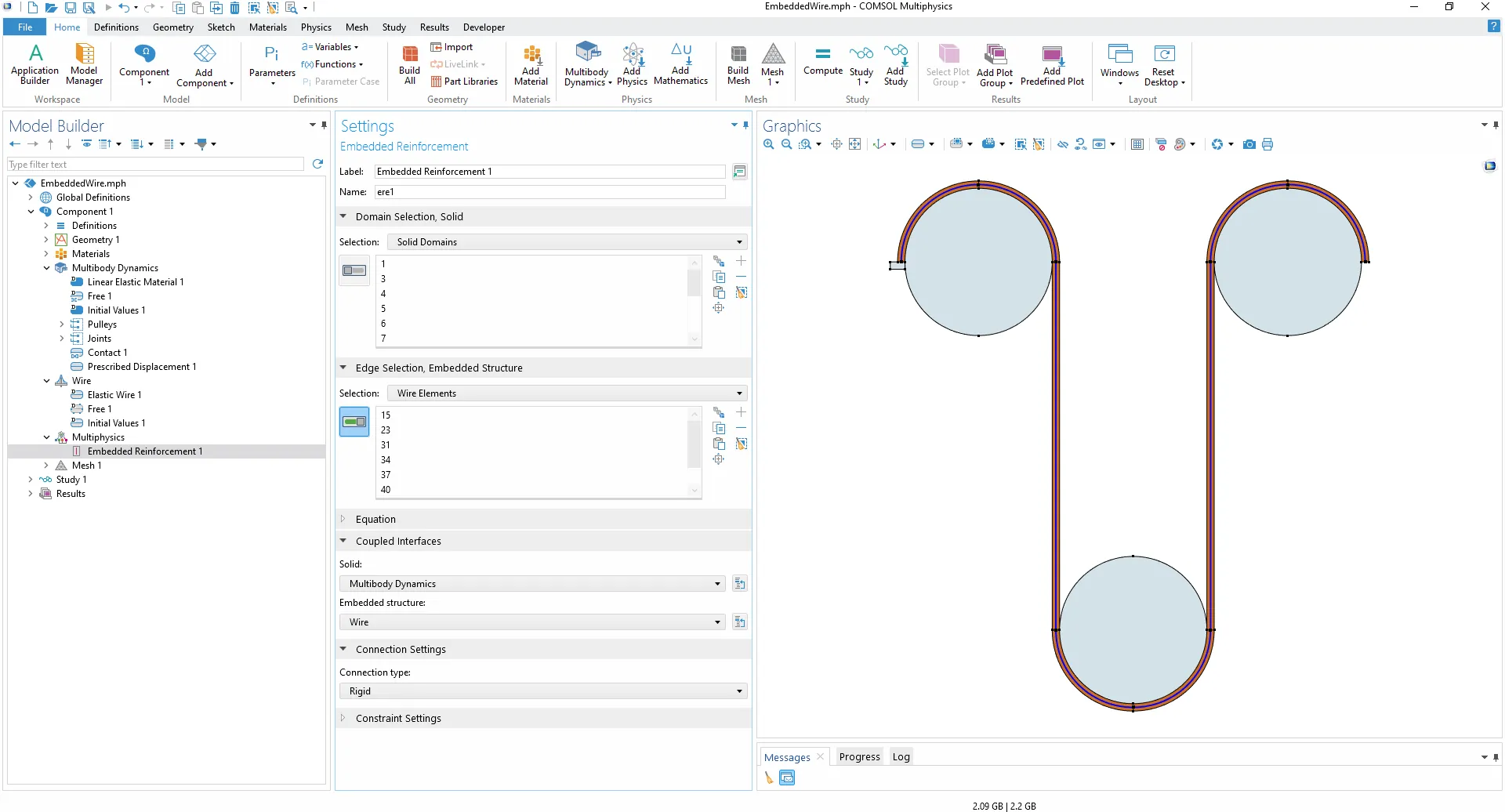
Refuerzo incorporado utilizado para reforzar un sistema cable-polea.
Estructuras sin restricciones al modelar el contacto
Los problemas de contacto a menudo implican restricciones insuficientes hasta que se haya establecido el contacto. Como resultado, la matriz de rigidez se vuelve singular. Se ha añadido una nueva función Stabilization para aliviar esta dificultad inherente.
Presión de contacto en una conexión de tubo atornillada.
Desplazamiento limitado
Se ha añadido la posibilidad de prescribir un desplazamiento limitado (es decir, la distancia máxima que un punto, arista o contorno puede moverse en una determinada dirección) a las interfaces Solid Mechanics, Multibody Dynamics, Shell, Layered Shell y Membrane. Esta funcionalidad puede verse como una versión simplificada del análisis de contactos, donde no se necesita ningún segundo objeto para detener el movimiento. En versiones anteriores, esta funcionalidad solo estaba disponible en las interfaces de tipo arista, como Beam o Truss, y por lo tanto solo era aplicable a aristas o puntos.
Nuevos modelos tutoriales
|
Magnetic–Structure Interaction in a Permanent Magnet Motor |
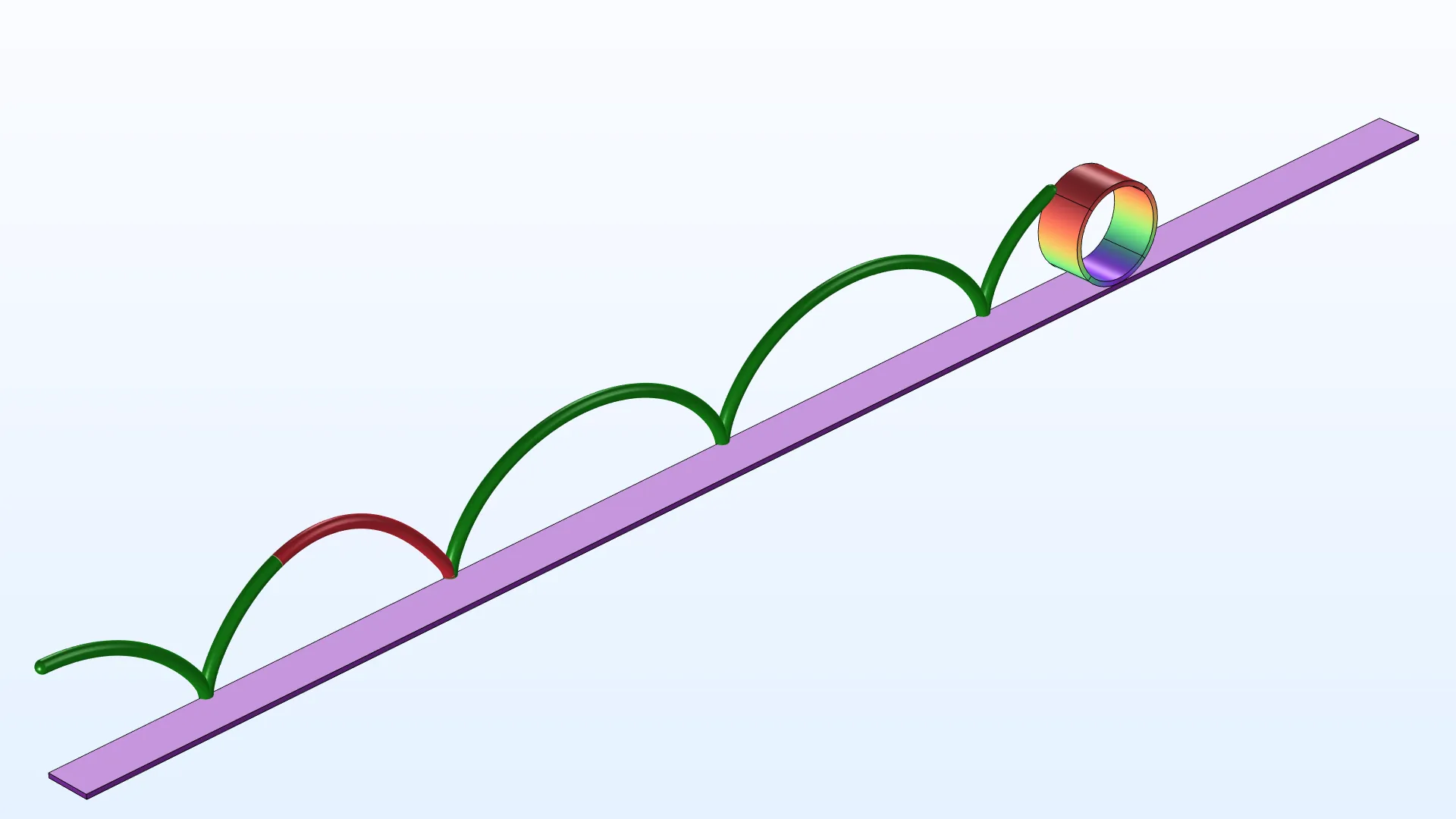
Dynamics of a Hopping Hoop |
6.1
NOVEDADES
La version 6.1 introduce mejoras en el modelado de contactos, una interfaz para analizar cables y alambres y un nuevo método para reforzar la continuidad entre contornos en ensamblajes.
Mejoras en el modelado de contactos
Se han realizado varias mejoras y ampliaciones a la funcionalidad del modelado de contactos.
- Se ha implementado un nuevo algoritmo de búsqueda de contacto más rápido. Es particularmente ventajoso para grandes modelos 3D.
- Se ha añadido el Método de Nitsche, un nuevo método para formular las ecuaciones de contacto. Se trata de un robusto método que no añade grados de libertad extra.
- Se han añadido nuevas formulaciones más estables de las ecuaciones de contacto para todos los modelos de contacto.
- Se han mejorado las formulaciones para cáscaras y membranas. Ahora se utiliza la superficie real en geometrías curvas.
- Se ha mejorado el soporte para autocontacto. La formulación ahora es simétrica entre los dos lados del par de contacto.
Interfaz física para cables
Una nueva interfaz Wire se ha añadido para el análisis de sistemas de cables y alambres, que puede realizarse separadamente o en conjunto con otros tipos de estructuras. Los alambres pueden estar pretensados o combados bajo su propio peso. Puede verse esta funcionalidad en el nuevo modelo tutorial "Linear Buckling Analysis of a Truss Tower with Dead Loads".
Nuevo método para conectar ensamblajes
Se ha añadido el método de Nitsche para reforzar la continuidad entre contornos en ensamblajes. Esto tiene dos importantes ventajas cuando se compara con las restricciones puntuales clásicas:
- Causa significativamente menos perturbaciones locales en la solución cuando las mallas de los dos lados no son conformes.
- Como no se añaden restricciones, se evita el paso de eliminación de restricciones numéricamente sensible, y a veces, computacionalmente pesada.
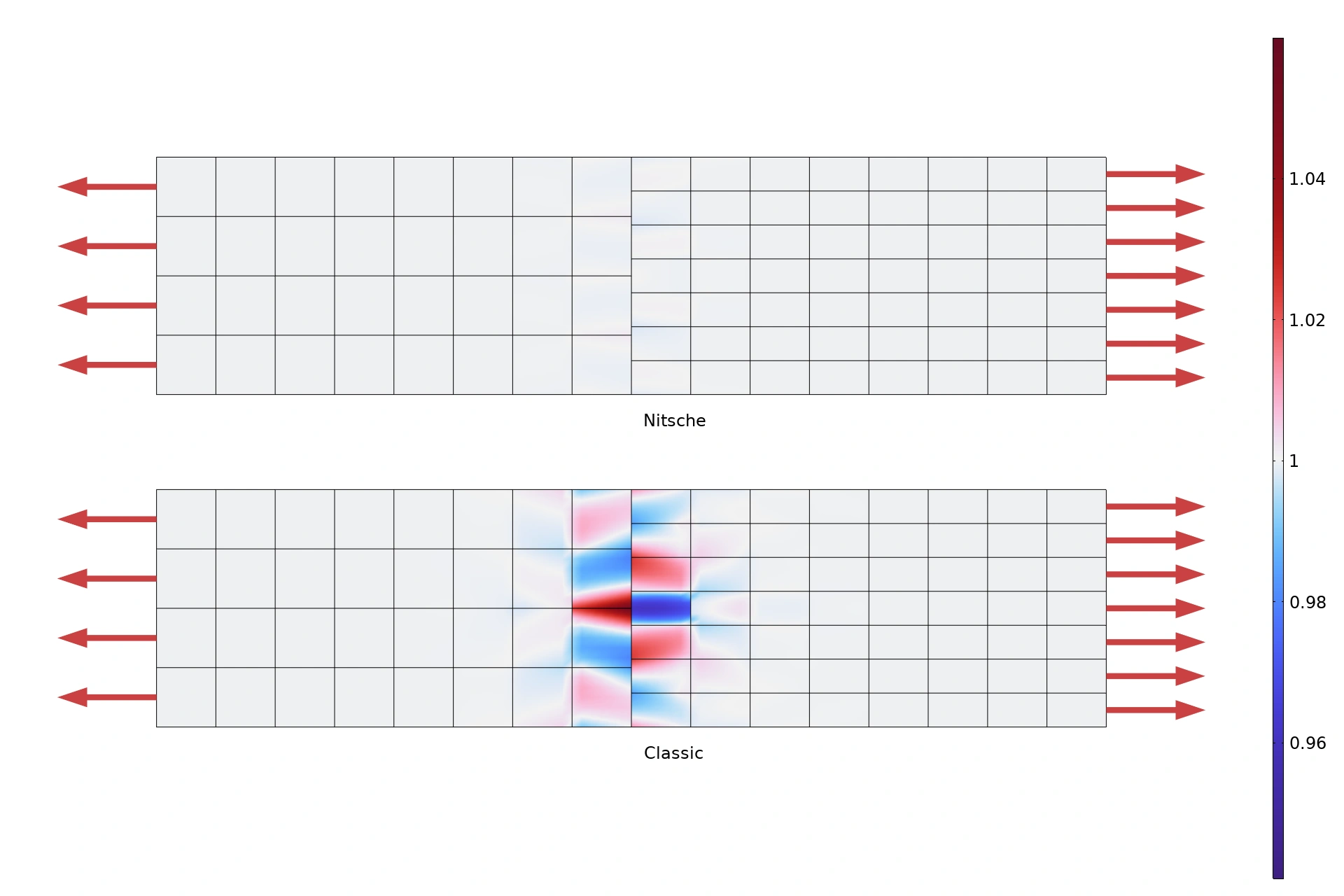
Comparación de la alteración de la tensión local cuando se usa una restricción clásica o el nuevo método de Nitsche para conectar mallas que no coinciden.
Mejoras en la síntesis del modo de componente
Ahora es posible utilizar elementos de cáscara en análisis de síntesis en modo componente (CMS). También hay varias mejoras generales que facilitan la configuración de modelos para análisis CMS.
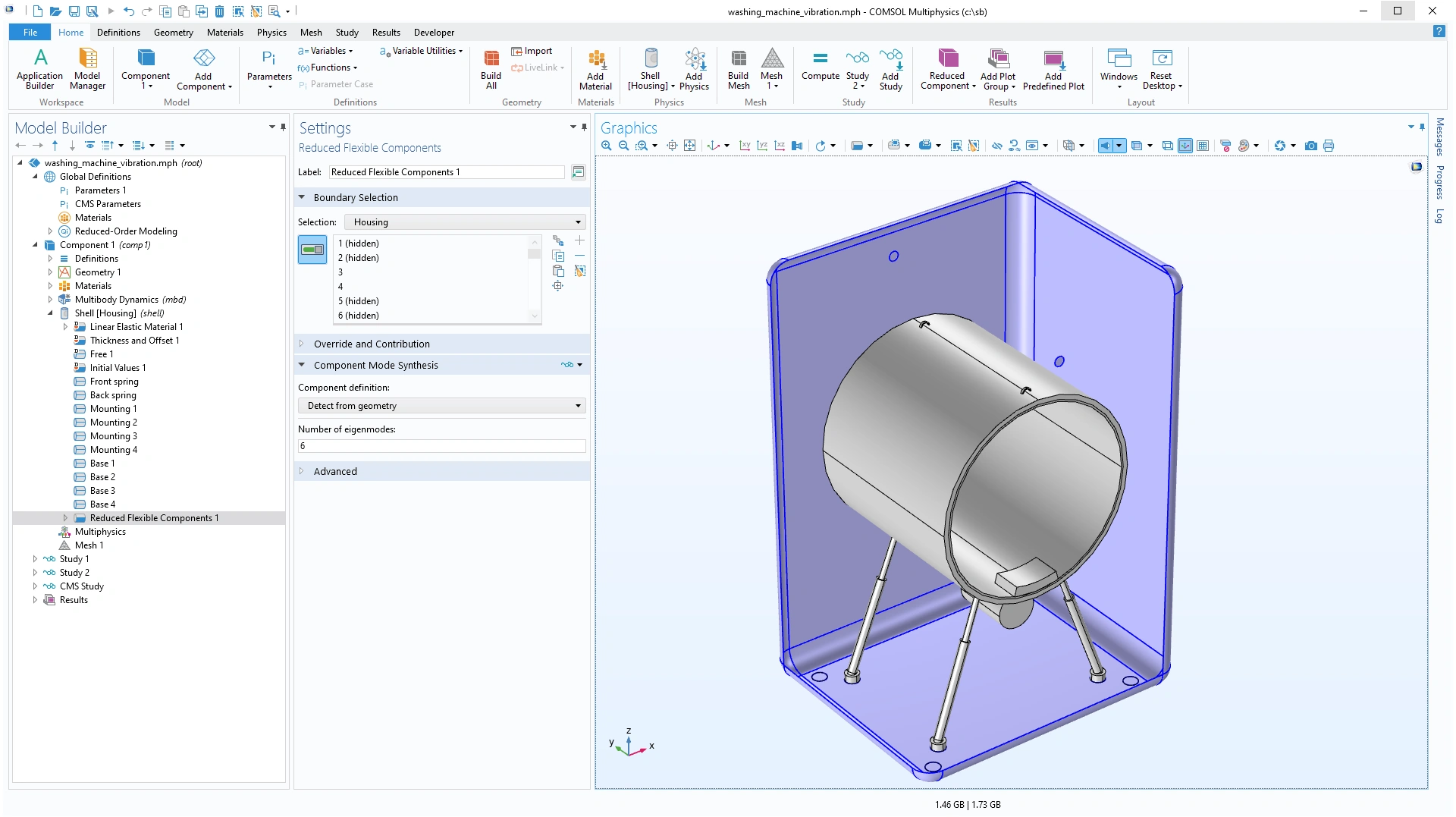
Un estudio de la dinámica de una lavadora. El tiempo de análisis se reduce por un factor de 2 cuando el armazón que representa el recinto se reduce a un componente CMS.
Excitación de base
Es habitual que la carga dinámica sobre una estructura consista en una determinada aceleración de todos sus puntos de apoyo. Ejemplo de esto es cuando una pieza se une a una mesa vibradora para realizar pruebas o cuando un edificio se somete a una aceleración del suelo con una longitud de onda larga. Este tipo de carga ahora se puede describir de forma más natural utilizando la nueva función Base Excitation. Es muy adecuada para el análisis de vibraciones aleatorias. Puede verse esta actualización en los modelos existentes "Shock Response of a Motherboard" y "Random Vibration Test of a Motherboard".
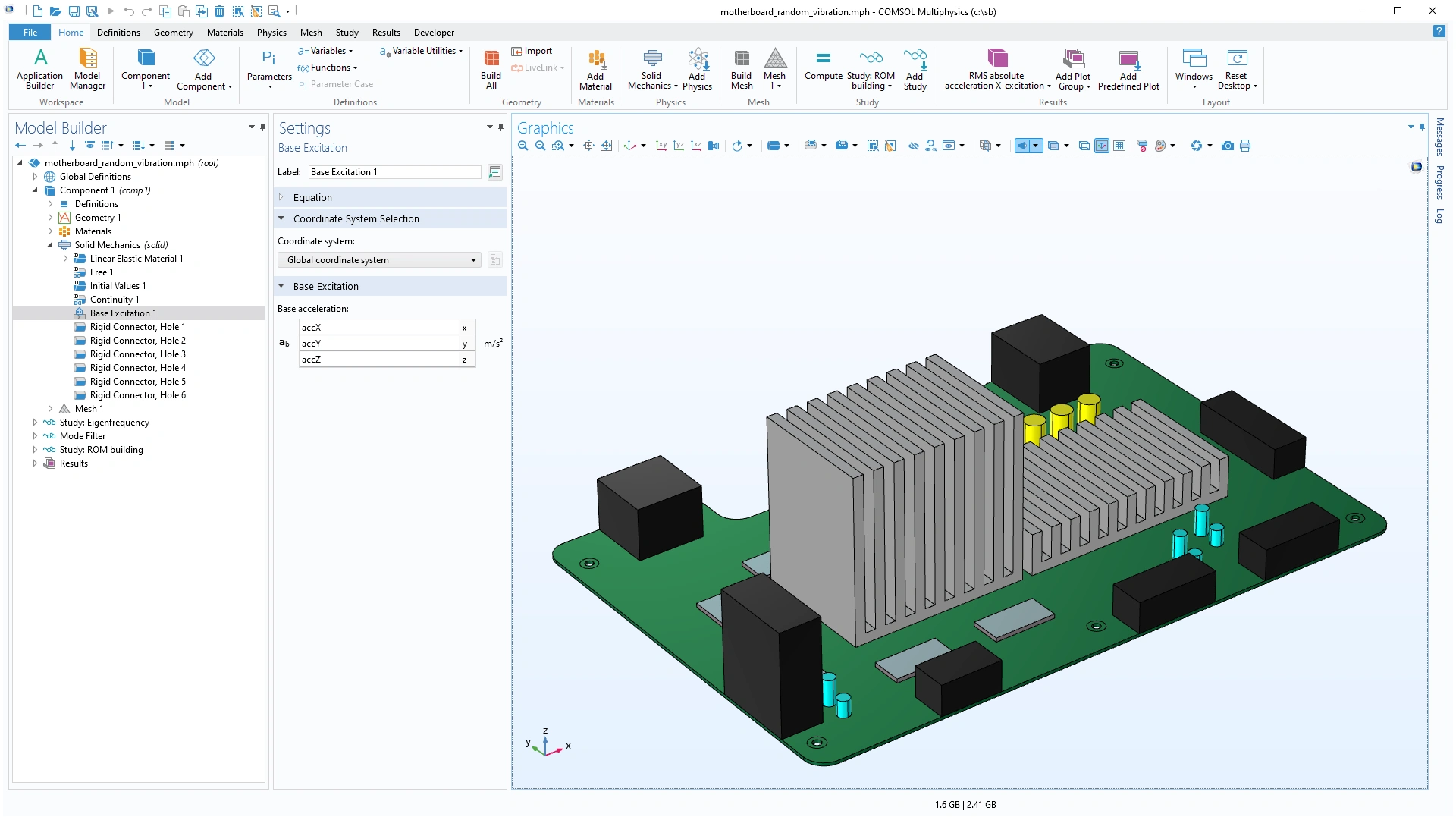
Un ejemplo del uso de la función Base Excitation, donde se utilizan tres densidades espectrales de potencia de entrada (PSD) en un análisis de vibración aleatorio. La excitación base es una propiedad de todo el modelo, por lo que esta característica no tiene selecciones.
Cargas dadas como resultante
Para cargas límite y conjuntos de cargas puntuales, ahora puede especificarse la fuerza y el momento totales con respecto a un punto determinado seleccionando la opción Resultant de la lista Load type. Esto facilita la aplicación de resultantes de carga sin imponer restricciones artificiales ni realizar largos cálculos de las distribuciones de carga reales. Es posible controlar la forma supuesta de la distribución de la carga.
Mejoras para conectores rígidos
El Conector rígido es una herramienta importante para el modelado abstracto, como cuando se aplican cargas y se conectan objetos. Su funcionalidad ha sido aumentada en tres aspectos:
- Ahora es posible desconectar grados de libertad seleccionados, como en direcciones dadas por un sistema de coordenadas local. Con esta opción, es posible liberar restricciones excesivas y reducir las concentraciones de esfuerzos locales.
- Para conectores rígidos de dos puntos en 3D, es posible suprimir automáticamente la singularidad rotacional potencial.
- Como nuevo valor predeterminado, los grados de libertad que generan los conectores rígidos ahora se agrupan en la secuencia de estudio. Esto puede reducir drásticamente la cantidad de nodos en el árbol del modelo y facilita la aplicación del escalado manual para la tolerancia de convergencia. El mismo cambio también se aplica a la característica Attachment.
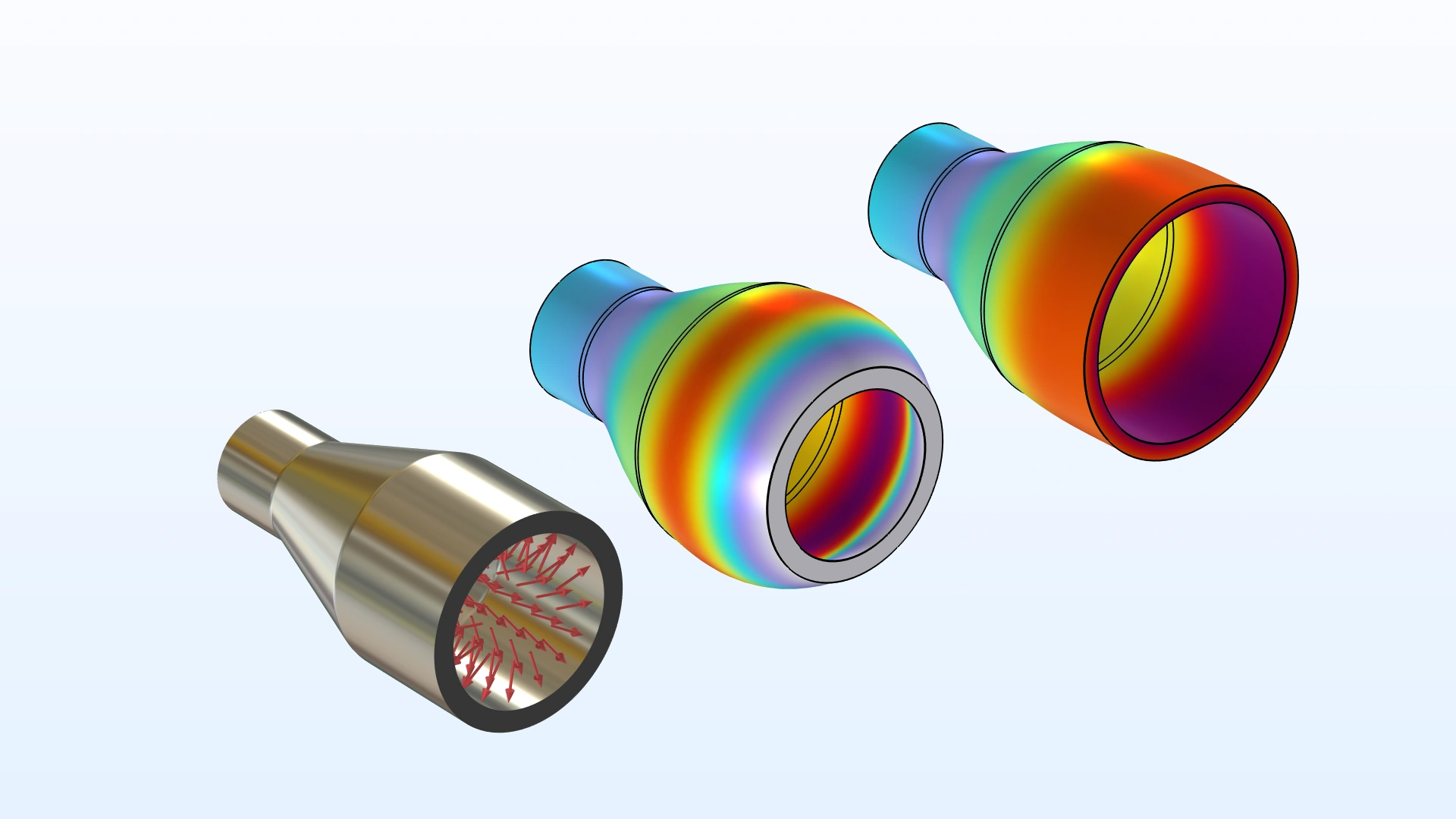
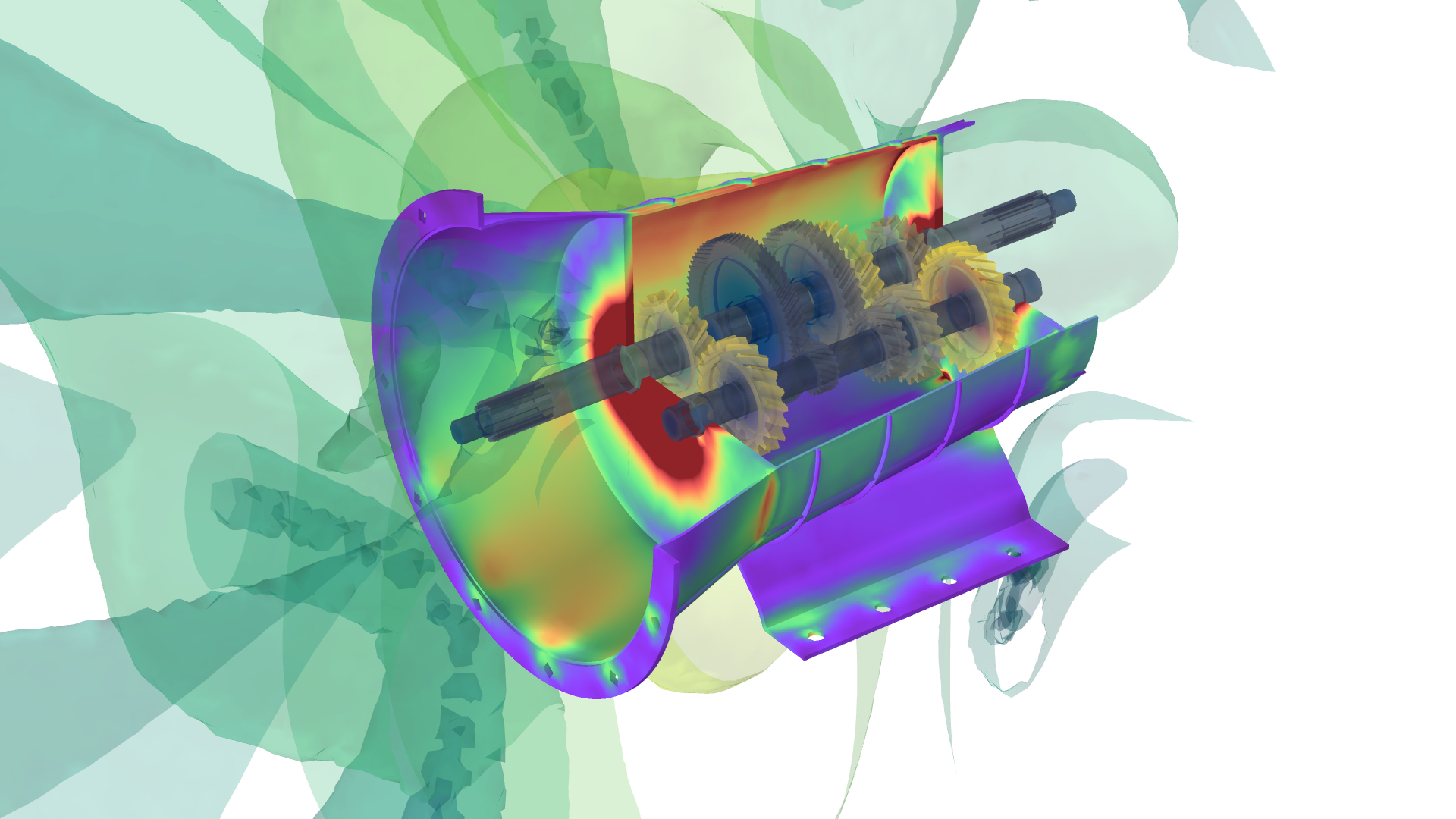
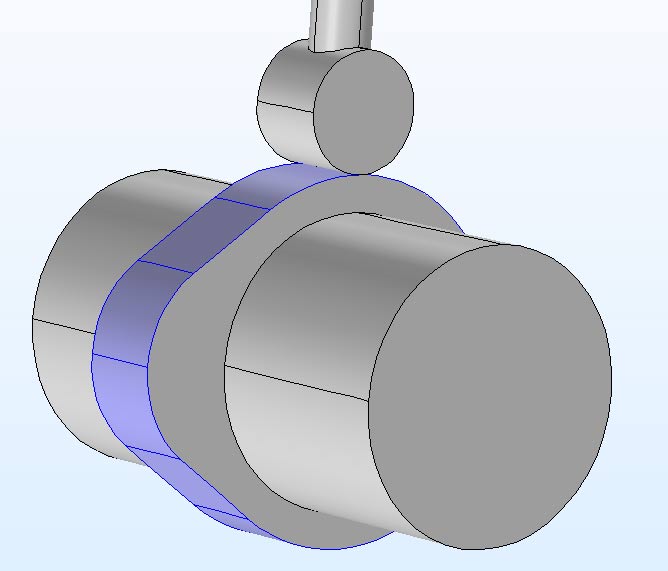
Efectos de los grados de libertad liberados. El reductor con presión interna tiene un conector rígido en el extremo, como se muestra en la superficie marrón de la figura de la izquierda. Con una formulación estándar, la suposición sobre la rigidez mantendrá el radio constante, como se muestra en la figura del medio. En la figura más a la derecha, el desplazamiento radial se libera en el conector rígido. Todavía es posible, por ejemplo, aplicar cargas en cualquier dirección o conectarse a otros dominios.
Resultados en sistemas de coordenadas locales
Ahora es fácil definir un número arbitrario de sistemas de coordenadas locales añadiendo nodos de Resultados del sistema local para la evaluación de cantidades comunes en las interfaces de Mecánica estructural. Entre las cantidades transformadas disponibles, se encuentran tensiones, deformaciones, desplazamientos y propiedades de los materiales.
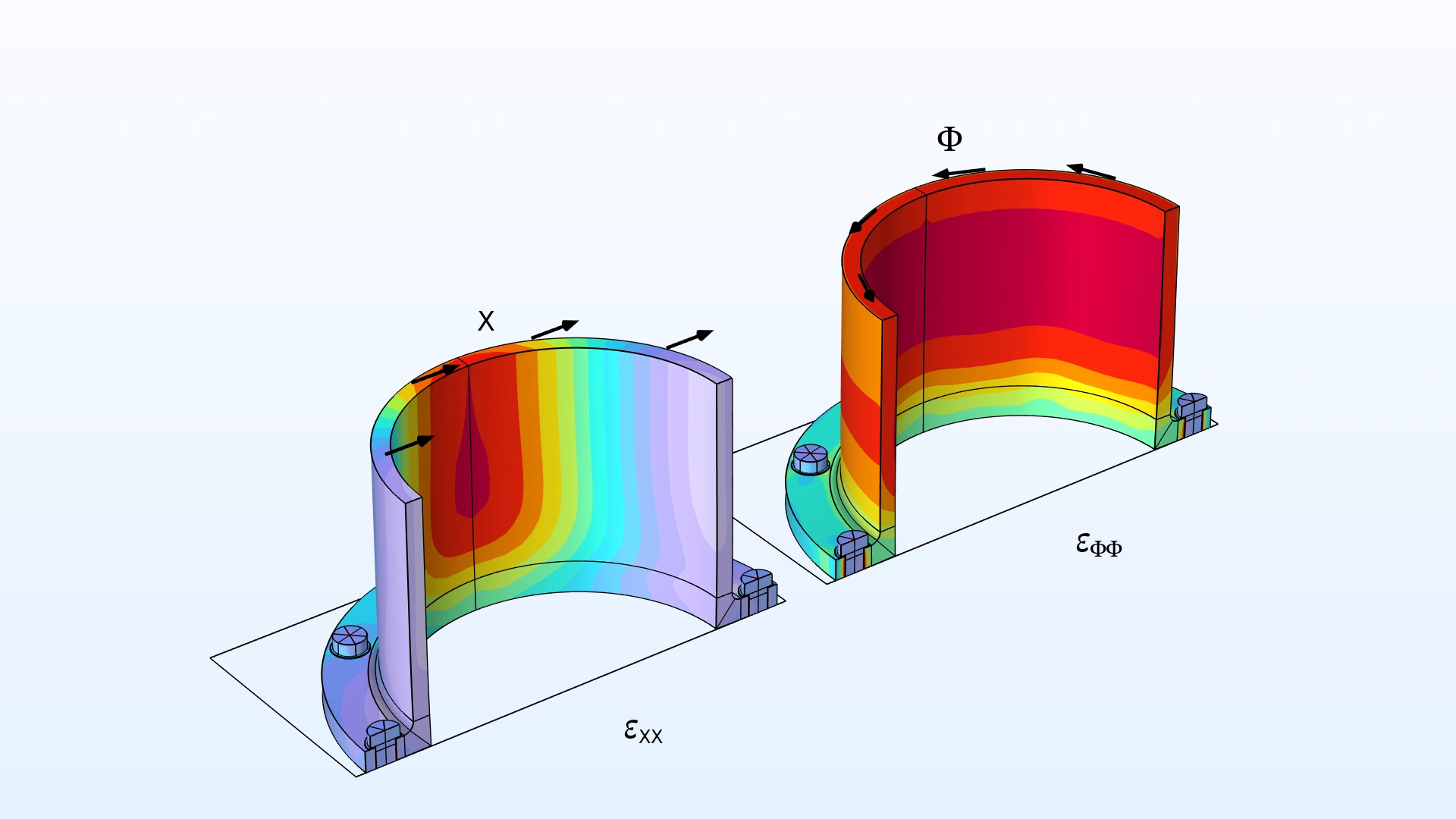
Deformación directa en la dirección x global y la dirección azimutal para una geometría con simetría cilíndrica.
Gráficos predefinidos
Se ha añadido una nueva funcionalidad general para gráficos predefinidos. Un gráfico predefinido es similar a un gráfico predeterminado, pero con la diferencia importante de que no se añade al Model Builder hasta que el usuario elige hacerlo. Esto tiene tres ventajas:
- El número de gráficos predeterminados que se generan para cada estudio se ha reducido significativamente.
- Varios nuevos gráficos útiles están disponibles en el menú Add Predefined Plot, además de los gráficos predeterminados en versiones anteriores.
- Los gráficos de resultados para los pasos de estudio intermedios, por ejemplo, el paso de carga en un análisis dinámico pretensado, están disponibles directamente.
La ventana Add Predefined Plot para uno de los modelos de la Biblioteca de aplicaciones.
6
NOVEDADES
La versión 6.0 trae contacto mejorado de cuerpo rígido, la síntesis de modo componente, y una nueva funcionalidad de cargas puntuales en ubicaciones arbitrarias.
Síntesis de modo componente
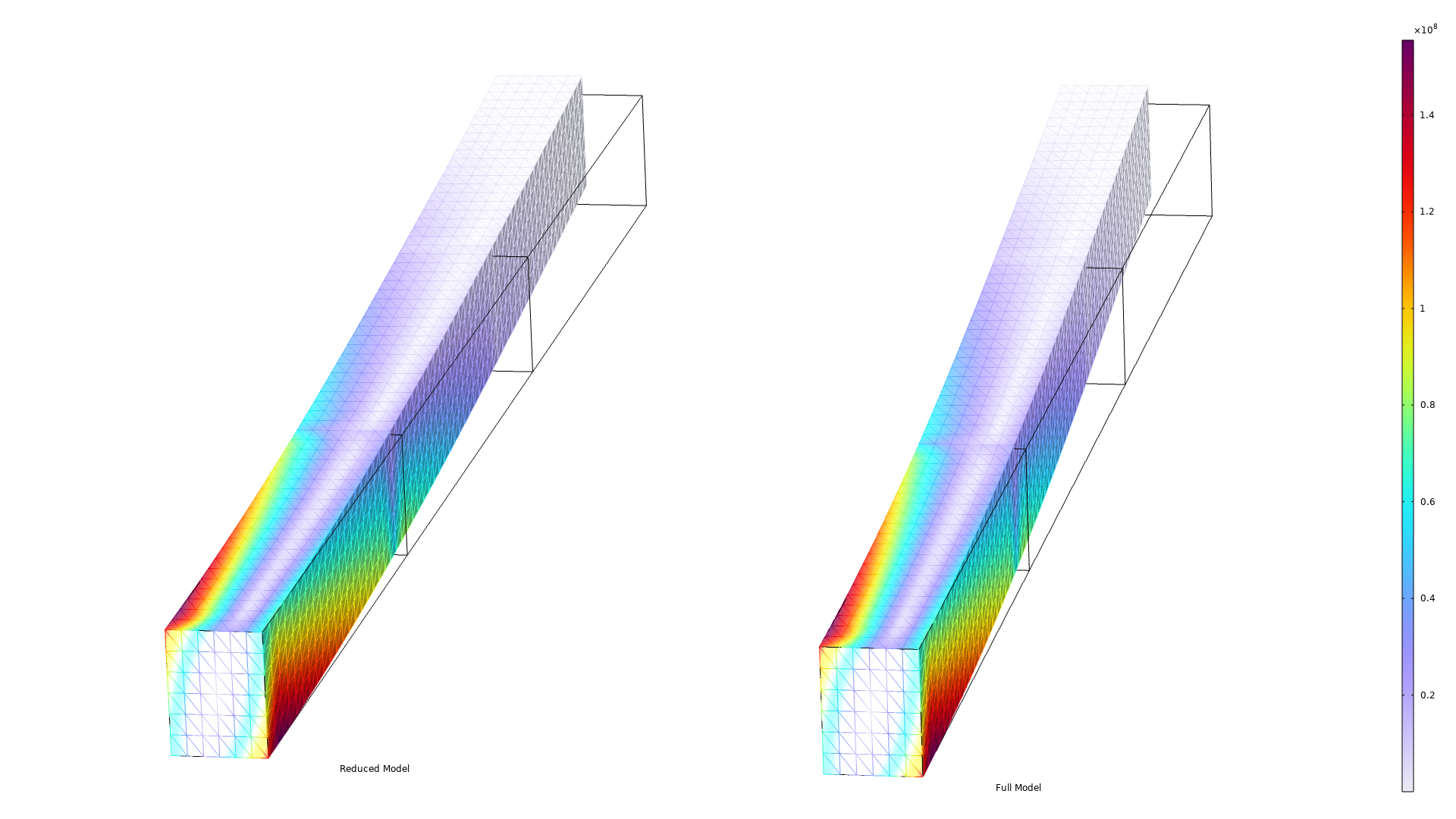
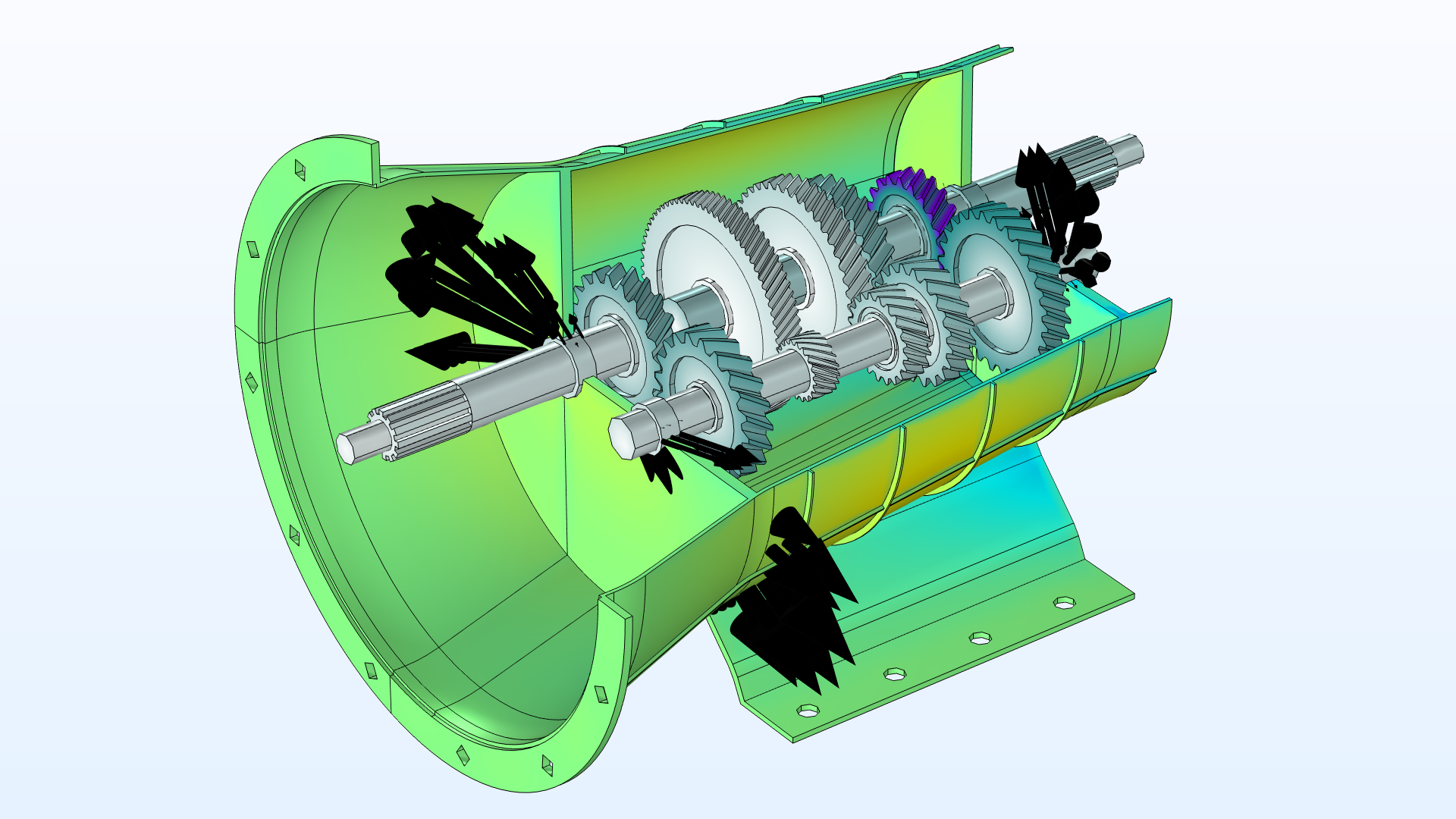
Los componentes lineales construidos utilizando las interfaces de Mecánica de Sólidos y Dinámica Multicuerpo se pueden reducir a modelos de orden reducido computacionalmente eficientes usando el método Craig-Bampton. Estos componentes se pueden utilizar en análisis dinámicos o estacionarios, ya sea en un modelo que consta completamente de componentes reducidos o junto con modelos de elementos finitos elásticos no reducidos. Este último puede entonces ser no lineal. El enfoque, que se denomina síntesis en modo componente (CMS) o subestructuración dinámica, puede proporcionar grandes mejoras en términos de tiempo de cálculo y uso de memoria. Los resultados, como tensiones y deformaciones, en un componente reducido se pueden presentar de la misma forma que para cualquier otra parte del modelo. Puede verse esta nueva funcionalidad en el modelo tutorial Modeling Vibration and Noise in a Gearbox: CMS Version.
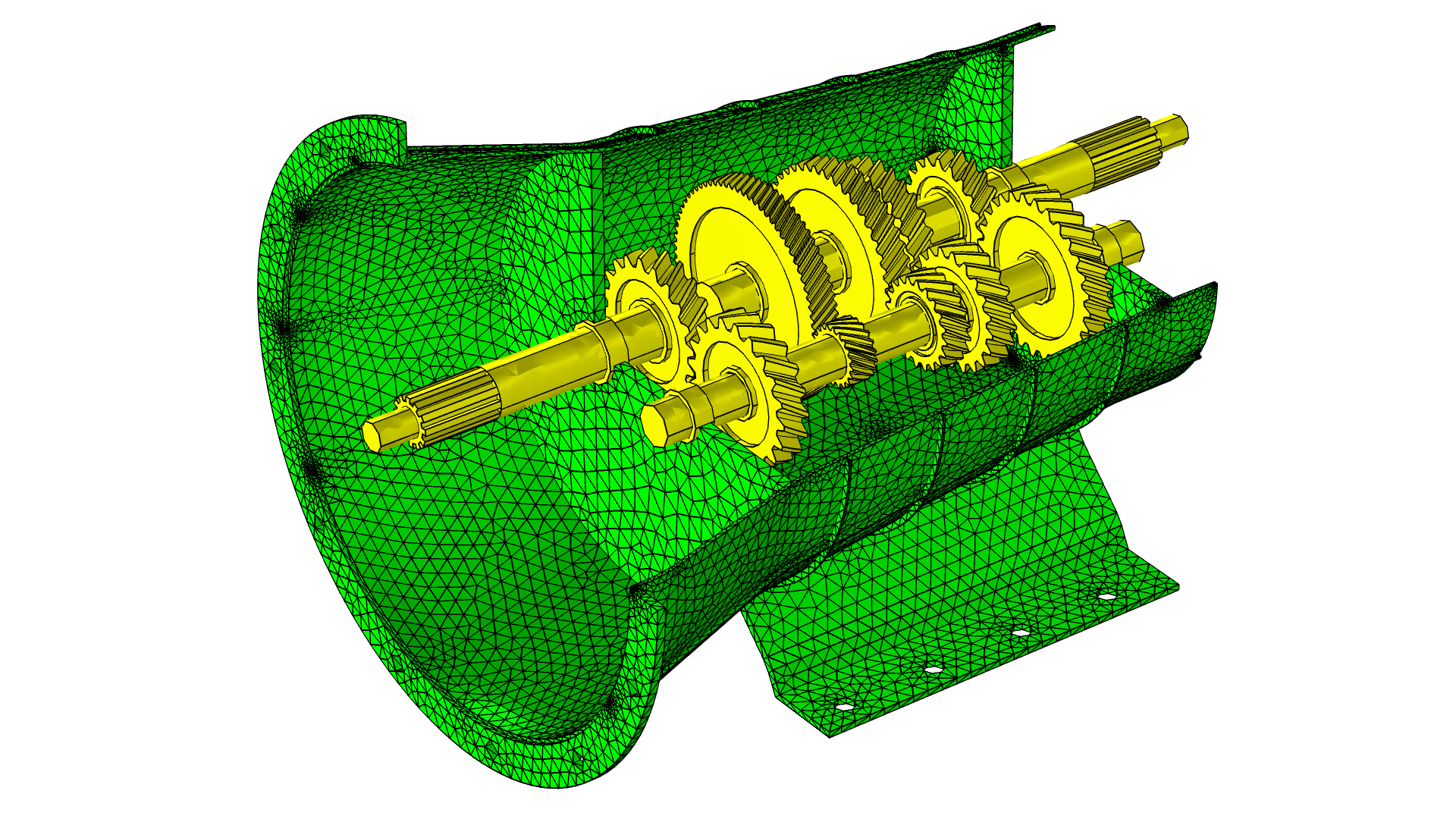
En este modelo de una caja de cambios, la carcasa (verde) se reduce a un modelo dinámico equivalente con 74 grados de libertad (DOF), que actúa como soporte para el mecanismo de engranajes. El modelo total, fuertemente no lineal, de los engranajes rotativos entonces tiene 170 grados de libertad.
Nueva forma cilíndrica en contacto de cuerpo rígido
La funcionalidad Contacto de cuerpo rígido, disponible con la interfaz Dinámica multicuerpo se ha ampliado y ahora hay formas estándar adicionales disponibles en 3D y 2D. Ahora hay soporte para formas cilíndricas en 3D, lo que hace posible modelar el contacto esfera-cilindro así como cilindro-cilindro. El nuevo contacto cilindro-cilindro puede, por ejemplo, manejar el siguiente escenario:
- Configuraciones paralelas, que se cruzan o que no se cruzan ni paralelas
- Cilindros finitos o infinitos
- Contactos exteriores o interiores
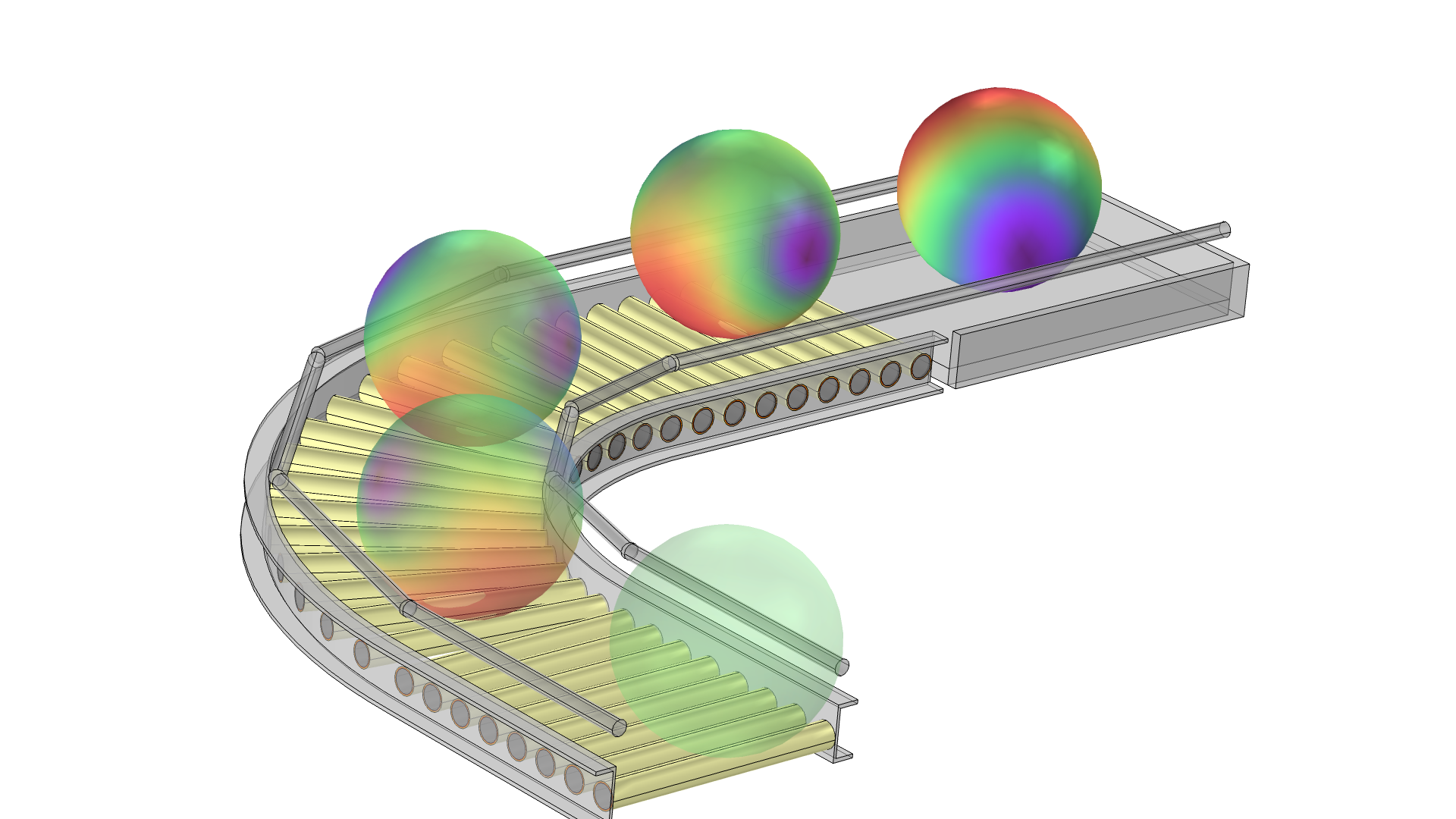
Puede verse esta nueva funcionalidad en el modelo tutorial Dynamics of a Roller Conveyor.
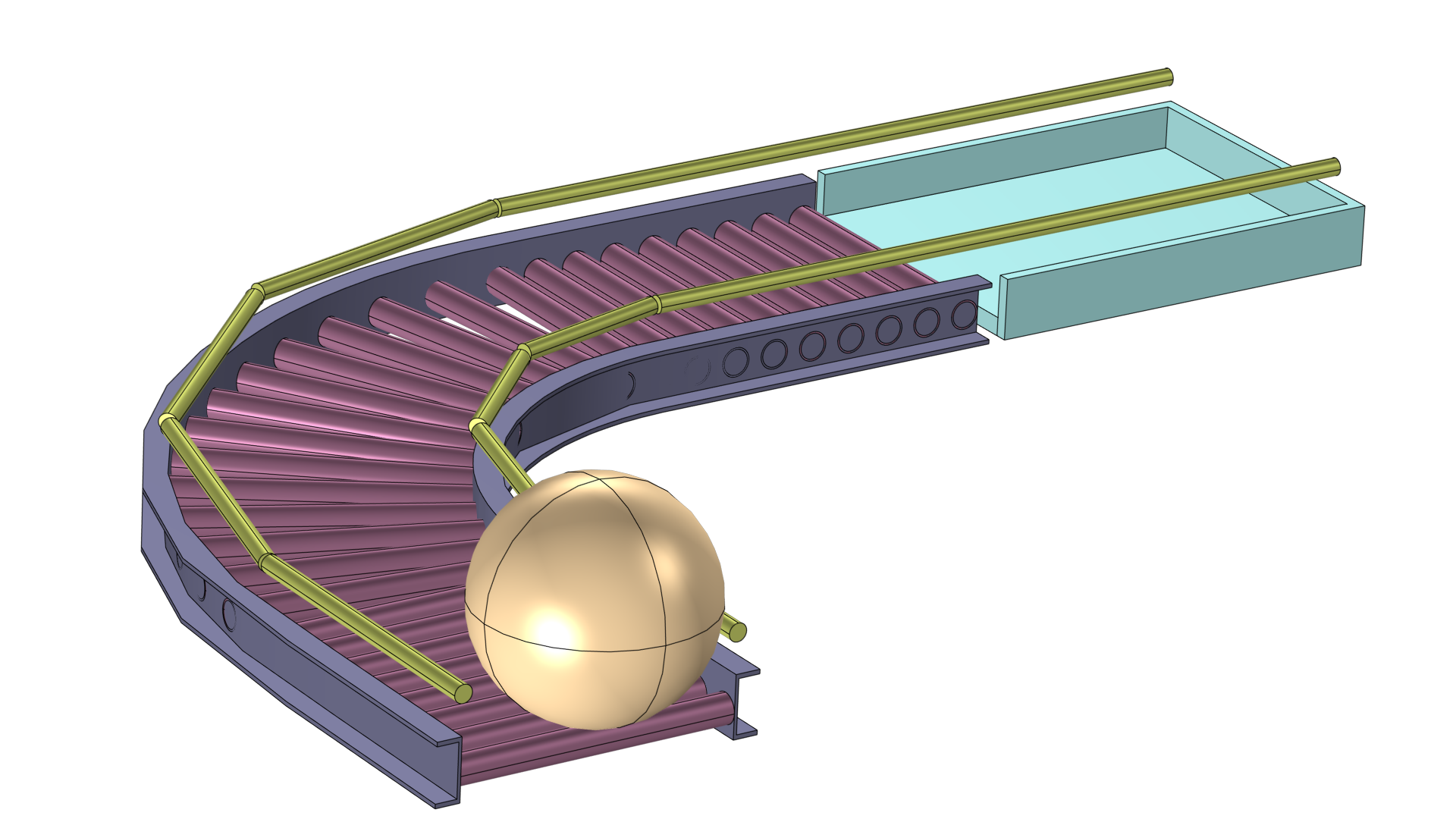
En este modelo de un transportador de rodillos, todos los cuerpos se suponen rígidos. El contacto de fricción entre los rodillos y la bola se modela usando la nueva opción de esfera-cilindro en la función de Contacto de Cuerpo Rígido.
Nueva forma plana en contacto de cuerpo rígido
En versiones anteriores, era posible modelar el contacto con una forma plana utilizando la opción de forma Arbitraria definida por el usuario en la funcionalidad de Contacto de cuerpo rígido. Ahora, hay soporte directo para la forma Plana en la funcionalidad de Contacto de cuerpo rígido en 3D y 2D. Esto es computacionalmente más eficiente en comparación con la opción de forma arbitraria basada en la malla que se utilizaba en versiones anteriores. Esta nueva opción permite modelar el contacto plano-esférico y cilindro-plano en 3D y el contacto circular-plano en 2D. Puede verse esta nueva funcionalidad en el modelo Dynamics of a Roller Conveyor.
Cálculo de parámetros de forma en contacto de cuerpo rígido
En las versiones anteriores de COMSOL Multiphysics®, los parámetros de forma geométrica de los cuerpos rígidos con forma estándar (tales como radio, centro, eje, longitud, etc.) se especificaban manualmente por el usuario en el nodo Contacto de cuerpo rígido. Ahora, tanto en 2D como en 3D, dichos parámetros geométricos se determinan automáticamente a partir de la geometría de los dominios rígidos seleccionados. Esto hace que el proceso de modelado sea más sencillo y robusto. Puede verse en el modelo tutorial Dynamics of a Roller Conveyor.
Cargas puntuales en ubicaciones arbitrarias
Con las nuevas funcionalidades Carga puntual, Libre y Carga anular, Libre, se pueden aplicar cargas puntuales en ubicaciones arbitrarias que no coincidan con un punto geométrico o un nodo de malla. Esto es particularmente útil en los siguientes casos:
- Mallas importadas, donde puede que no haya puntos adecuados para la aplicación de la carga.
- Cargas móviles
- Modelos con muchas cargas puntuales, en cuyo caso puede resultar poco práctico crear puntos geométricos en todas las ubicaciones de carga
Esta funcionalidad está disponible en las interfaces de Mecánica de sólidos, Cáscara, Placa, Membrana, Viga, Armazón y Dinámica multicuerpo.
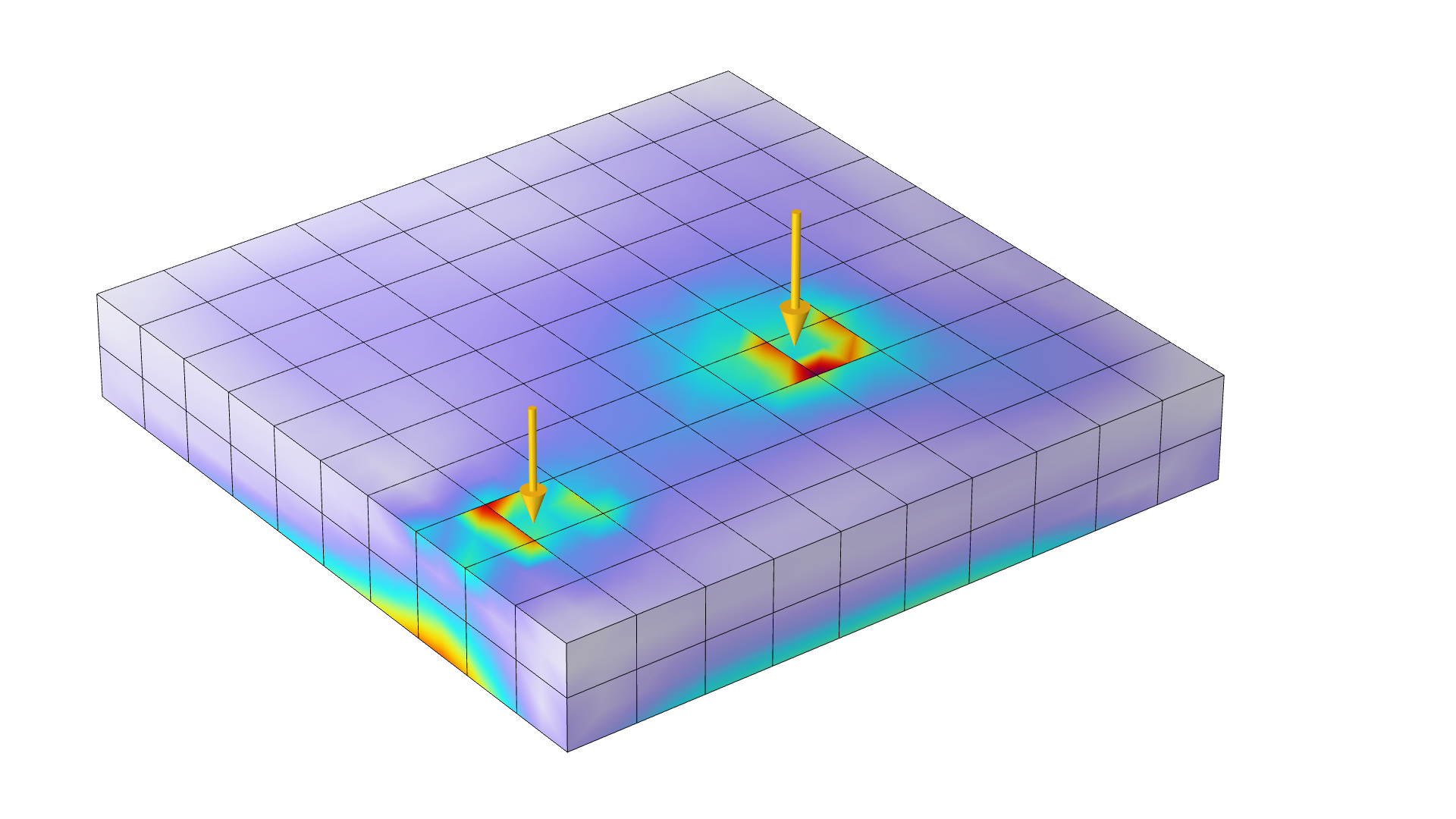
Dos cargas puntuales independientes de la malla sobre un bloque sólido
Modelado significativamente más fácil del contacto mecánico
El análisis estructural de montajes, incluido el contacto mecánico, ahora es mucho más fácil de configurar. Esto se debe a la automatización incluida de funcionalidades de pares, contacto y de continuidad. Si hay al menos un par de contactos en el modelo, se creará automáticamente un nodo de Contacto predeterminado en las interfaces de mecánica estructural relevantes. Del mismo modo, si hay al menos un par de identidades, se crea automáticamente un nodo de Continuidad predeterminado. Por lo tanto, si las partes de la geometría se colocan adyacentes entre sí, también se conectarán desde el punto de vista de la física, asumiendo que se está utilizando la creación automática de pares en el nodo Form Assembly en la secuencia geométrica.
Como resultado de la reformulación general de la funcionalidad del par, la casilla de verificación Fuente externa a la física actual en Contacto ya no es necesaria y se ha eliminado. Es decir, el contacto entre diferentes interfaces físicas también se maneja automáticamente.
Todos los modelos que contienen Contacto o Continuidad se han actualizado en consecuencia.
Nuevos modelos de amortiguación
Se han añadido nuevos modelos de amortiguación a la función Material elástico lineal:
- El modelo de Atenuación de ondas es esencialmente un modelo viscoso, pero con parámetros dados por datos medidos para la atenuación de ondas elásticas en el material.
- El modelo de Factor de pérdida máxima está destinado principalmente al análisis en el dominio del tiempo de materiales para los que una representación del factor de pérdida proporciona una buena descripción en el dominio de la frecuencia.
Integración reducida
Se ha añadido un nuevo marco de trabajo para integración reducida. Para elementos con funciones de forma lineal, la integración reducida puede causar singularidades en la matriz de rigidez. Esto se contrarresta con la adición de estabilización de reloj de arena. La integración reducida se controla desde la sección Ajustes de cuadratura en el nodo Material elástico lineal. La regla de integración seleccionada será heredada por los subnodos que se puedan añadir.
Formulación mixta mejorada
En los modelos de material que tienen la opción de seleccionar una formulación mixta, ahora puede modificarse la discretización para la variable dependiente adicional (presión o deformación volumétrica). Esto facilita evitar bloqueos e inestabilidades en materiales con baja compresibilidad.
Cuando se selecciona una formulación mixta en la configuración de Material elástico lineal, aparecerá automáticamente una nueva sección de Discretización para el modelo de material. En esta sección, se puede elegir entre diferentes tipos de funciones de forma para la variable dependiente adicional.
Nuevos modelos tutoriales
|
Dynamics of a Roller Conveyor |
Modeling Vibration and Noise in a Gearbox: CMS Version |
|
Component Mode Synthesis Tutorial |
5.6
NOVEDADES
Fricción y contacto de cuerpo rígido
Se ha agregado un nuevo método para modelar el contacto entre cuerpos rígidos en la interfaz Dinámica multicuerpo. El nuevo método está disponible a través del nodo Contacto de cuerpo rígido y está diseñado para modelar contactos sin malla entre cuerpos rígidos con forma estándar. En esta versión, permite tipos de contacto Esférico-Esférico y Esférico-Arbitrario, donde el primero permite que una de las esferas quede hueca con los límites cóncavos interiores como superficies de contacto. La formulación de contacto se puede elegir como Penalización o Penalización, dinámica y la fuerza de fricción se modela utilizando una ley de fricción continua suave y numéricamente robusta que está disponible para estudios dependientes del tiempo. Puede verse esta funcionalidad en el nuevo modelo tutorial "Dynamics of a Cylindrical Roller Bearing".
Junta de holgura
En la vida real, las juntas no siempre ajustan perfectamente, sino que tienen holguras entre los dos componentes. Para modelar juntas imperfectas como esta, se puede utilizar el nuevo nodo Junta de holgura en la interfaz Dinámica Multicuerpo. Este nuevo tipo de articulación permite el movimiento a lo largo de todos los grados de libertad translacionales dentro de la distancia de holgura. Se utiliza un método de penalización para forzar la restricción de distancia. También permite el movimiento a lo largo de los grados de libertad rotacionales entre los dos componentes conectados y se comporta como una articulación de rótula en 3D o una articulación en bisagra en 2D. Puede verse esta funcionalidad en el nuevo modelo tutorial "Slider Crank Mechanism with Joint Clearance".
Creación de articulación automática desde la geometría
Ahora se pueden crear articulaciones automáticamente desde un montaje de geometría, lo que hace la configuración del modelo más fácil para sistemas multicuerpo grandes. Un nuevo botón Crear conexiones se ha añadido en la sección Configuración automatizada del modelo en la interfaz Dinámica multicuerpo. Este botón crea articulaciones automáticamente para los objetos geométricos en un ensamblaje y forma Pares de identidad entre ellos. De forma predeterminada, las juntas prismáticas, de bisagra y de bola se crean para límites planos, cilíndricos y esféricos, respectivamente. También es posible elegir cualquier otra articulación adecuada para un tipo particular de contorno. A las uniones creadas de esta manera se les asigna automáticamente información de origen, destino, centro y eje.
En este ejemplo, los nodos de unión de bisagra se crean automáticamente mediante el botón Crear uniones disponible en la sección Configuración automatizada del modelo de la interfaz de Dinámica multicuerpo.
Acoplamiento de conexión de estructura concentrada
Se ha añadido el nuevo acoplamiento Lumped-Structure Connection para conectar sistemas concentrados modelados utilizando la interfaz Lumped Mechanical System a los modelos de elementos finitos construidos utilizando la interfaz de mecánica estructural. La conexión en la interfaz Lumped Mechanical System puede realizarse utilizando el nodo External source o un Displacementt source, dependiendo de si el componente de elementos finitos tiene dos puertos o solo un puerto. Puede verse la funcionalidad en el modelo tutorial "Lumped Model of a Vehicle Suspension System".
Mejoras en el modelado de sistemas mecánicos concentrados
La funcionalidad de modelado de Lumped Mechanical System ha sido mejorada en muchos aspectos. Los subsistemas anidados y paramétricos ahora son compatibles con los sistemas mecánicos concentrados. Los subsistemas anidados facilitan el modelado de sistemas más complicados, mientras que los subsistemas paramétricos permiten crear modelos de subsistemas de uso más general. Se ha añadido una nueva sección de Parámetros de entrada a los nodos Subsystem Definition y Sybsystem Instance. Se pueden usar varias instancias de subsistema con diferentes parámetros de entrada en el mismo modelo.
Resorte no lineal en articulaciones
Se ha añadido una nueva opción de Tipo de resorte al subnodo de Resorte y amortiguador de todos los nodos de Articulación en la interfaz de Dinámica multicuerpo. La opción Tipo de resorte permite especificar la Fuerza como función de extensión además de la opción existente de especificar una Constante de resorte. Esto puede utilizarse para modelar un resorte no lineal unido a una articulación escribiendo la fuerza del resorte en función de la extensión. En las articulaciones que tienen grados de libertad de rotación, puede especificarse el Momento como función de la rotación.
Símbolo físico para articulaciones
Se ha añadido soporte para Símbolos físicos para todos los nodos de Articulaciones, que están disponibles en la interfaz Dinámica multicuerpo. El símbolo físico uitilizado es diferente para cada tipo de articulación y se localiza en el centro de la unión. Además, se dibujan líneas del conector desde el centro de la articulación a todos los centros de fuentes y destinos.
En este ejemplo, se muestran los símbolos físicos de las articulaciones. Los símbolos se colocan en el centro de la junta y las líneas de conexión (colores rojo y verde) se pueden ver conectando los centros de origen y destino con el centro de la junta.
Contacto dinámico
Los nuevos algoritmos para el contacto dinámico proporcionan una mejora significativa de la conservación del impulso y la energía durante los eventos de contacto transitorio. Esto significa que se puede modelar con precisión problemas de contacto transitorio con pasos de tiempo significativamente mayores que en versiones anteriores. Se accede a los nuevos métodos seleccionando la formulación dinámica de Penalización, dinámica o Lagrangiana aumentada, en el nodo de Contacto. Puede ver esta funcionalidad en los nuevos modelos tutoriales "Impact Between Tso Soft Rings" y "Impact Analysis of a Golf Ball".
Simulación de desgaste
Se han añadido métodos para modelar el desgaste mecánico en forma de un nuevo nodo de Desgaste, un subnodo bajo Contacto, disponible en las interfaces de Mecánica de Sólidos y Dinámica Multicuerpo. La tasa de desgaste se basa en una ecuación de Archard generalizada. Hay dos algoritmos para modelar el desgaste. Para el desgaste general y los cambios geométricos arbitrarios debido al desgaste, se utiliza un enfoque de geometría deformada. También hay un enfoque simplificado en el que el desgaste se incorpora al desplazamiento en el espacio de contacto. Puede verse la función de desgaste en el nuevo modelo tutorial "Disc Brake Pad Wear".
Puntos de conexión de resortes y amortiguadores
En todas las interfaces de mecánica estructural, se ha añadido una nueva función llamada Amortiguador del resorte para conectar dos puntos con un resorte y/o un amortiguador. Los puntos pueden ser puntos geométricos, pero también pueden ser abstractos, por ejemplo, mediante el uso de conexiones adjuntas o conexiones directas a cuerpos rígidos. El resorte puede ser físico, con una fuerza que actúa a lo largo de la línea entre los dos puntos, o descrito por una matriz completa, que conecta todos los grados de libertad de traslación y rotación en los dos puntos. La funcionalidad también hace posible conectar un resorte entre puntos en dos interfaces físicas diferentes.
Mejoras en el Conector rígido
Las características de Conector rígido tienen múltiples mejoras. En las interfaces Cáscara y Viga, las alternativas de selección se han extendido al nivel superior, es decir, contornos y aristas, respectivamente. Cuando el centro de rotación se define mediante una selección de puntos, el punto ya no tiene que ser parte de la interfaz física en sí. Pueden acoplarse conectores rígidos de diferentes interfaces físicas, definiendo así un nuevo tipo de objeto rígido virtual (esta selección se encuentra en la sección Avanzado de los ajustes del conector rígido). En las interfaces Mecánica de sólidos, Cáscara, y Viga, se pueden generar automáticamente los conectores rígidos de elementos RBE2 en un archivo importado en formato NASTRAN®. Esto se controla desde una sección denominada Modelado automático en los ajustes de estas interfaces. Los conectores rígidos pueden pertenecer a varias interfaces físicas para imitar las conexiones en el archivo importado.
El punto final de un perno modelado usando la interfaz Viga está rígidamente conectado a algunos límites en la cara de un sólido, modelado usando la interfaz Mecánica de sólidos.
Fricción con una velocidad de deslizamiento conocida
En algunas aplicaciones, se conoce la dirección de la fuerza de fricción, porque dos objetos se deslizan entre sí con una velocidad relativa determinada. En este caso, no es necesario resolver las fuerzas de fricción, lo que puede acelerar significativamente la solución. La nueva función Velocidad de deslizamiento, añadida como un subnodo bajo el nodo Contacto, se puede utilizar para estos casos. Las entradas para este nodo son similares a las del nodo Fricción. Puede verse esta nueva característica en el nuevo modelo "Disc Brake Pad Wear".
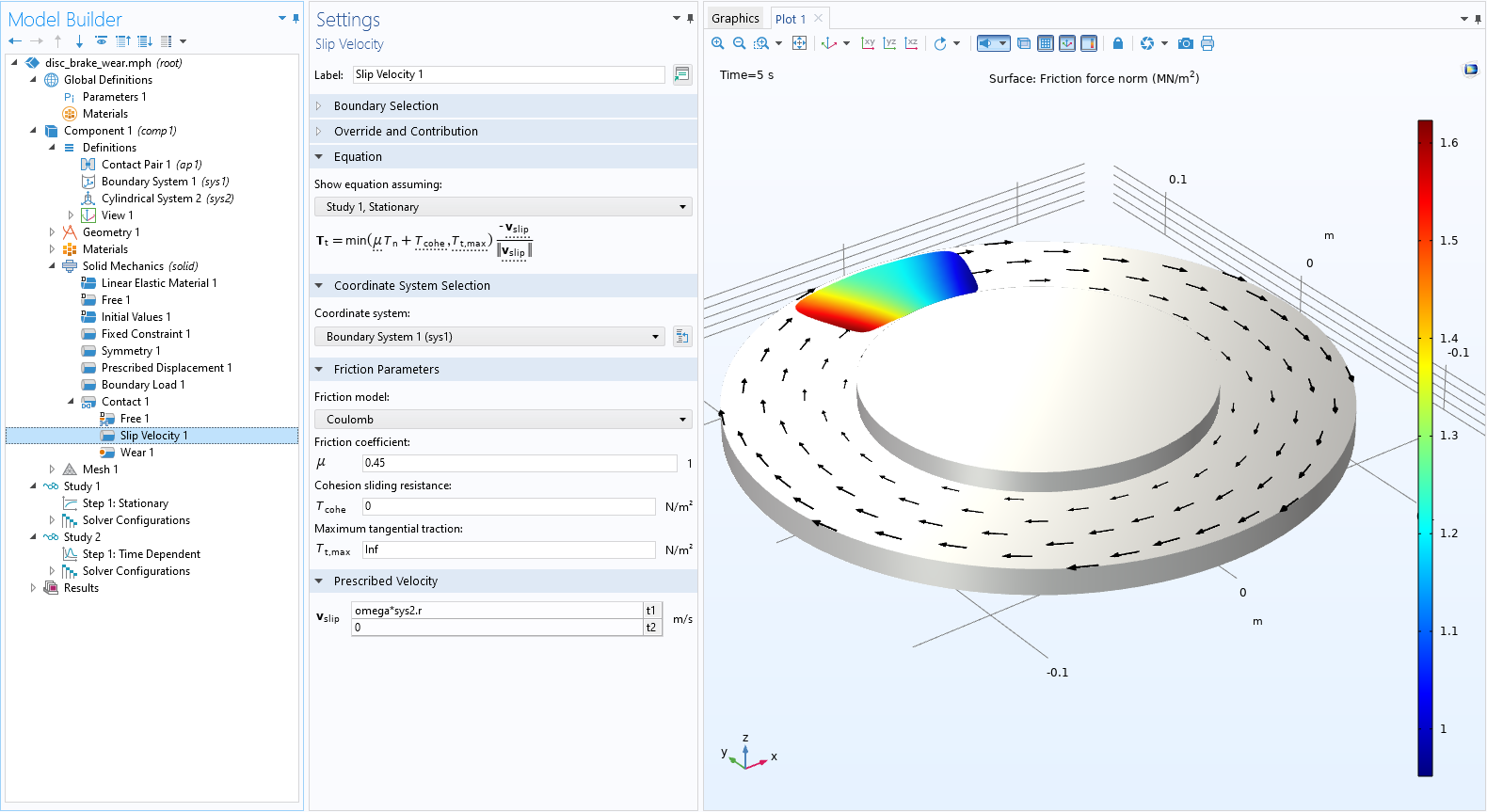
En este ejemplo, la fricción entre el disco de freno y la pastilla de freno se puede modelar utilizando el nodo Velocidad de deslizamiento, ya que el movimiento relativo se puede expresar analíticamente. El gráfico de superficie muestra la magnitud de la fuerza de fricción.
Nueva opción para prescribir la velocidad del marco giratorio
En el nodo Marco giratorio en las interfaces Mecánica sólida y Dinámica multicuerpo, se ha añadido una nueva opción de Cuerpo rígido. Con esta opción, se entra un par dependiente del tiempo alrededor del eje de rotación, y la velocidad de rotación se calcula mediante la integración de la ecuación de movimiento del cuerpo rígido.
Mejoras de contacto
Además de las nuevas funcionalidades de dinámica de contacto y desgaste, existen otras mejoras en el campo de la mecánica de contacto. Puede utilizarse un solucionador totalmente acoplado junto con el algoritmo de contacto Lagrangiano aumentado, lo que facilita la configuración de las secuencias del solucionador y mejora la estabilidad y la convergencia para algunos problemas. Además, en el subnodo Fricción bajo Contacto, puede seleccionarse Definido por el usuario como el modelo de Fricción para entrar directamente una expresión para la fuerza tangencial que causa el deslizamiento en términos de cualquier otra variable. Por último, hay varias formas nuevas de proporcionar factores de penalización, tanto para el método de penalización como para el método Lagrangiano aumentado.
Calcular la rotación a partir de los desplazamientos
En interfaces físicas que tienen desplazamientos como grados de libertad, a veces es necesario estudiar la rotación de una región. Para hacer eso, puede añadirse el nuevo nodo Rotación media, que usa los desplazamientos de un conjunto de puntos para generar variables que representan la rotación. Si se dan más de tres puntos, se aplica un esquema de mínimos cuadrados para hacer la mejor aproximación de una rotación de cuerpo rígido para todo el conjunto de puntos. Además, se pueden calcular las velocidades angulares y las aceleraciones. Puede verse esta nueva funcionalidad en los nuevos tutoriales "Impact Analysis of a Golf Ball" y el actualizado "Sensitivity Analysis of a Truss Tower".
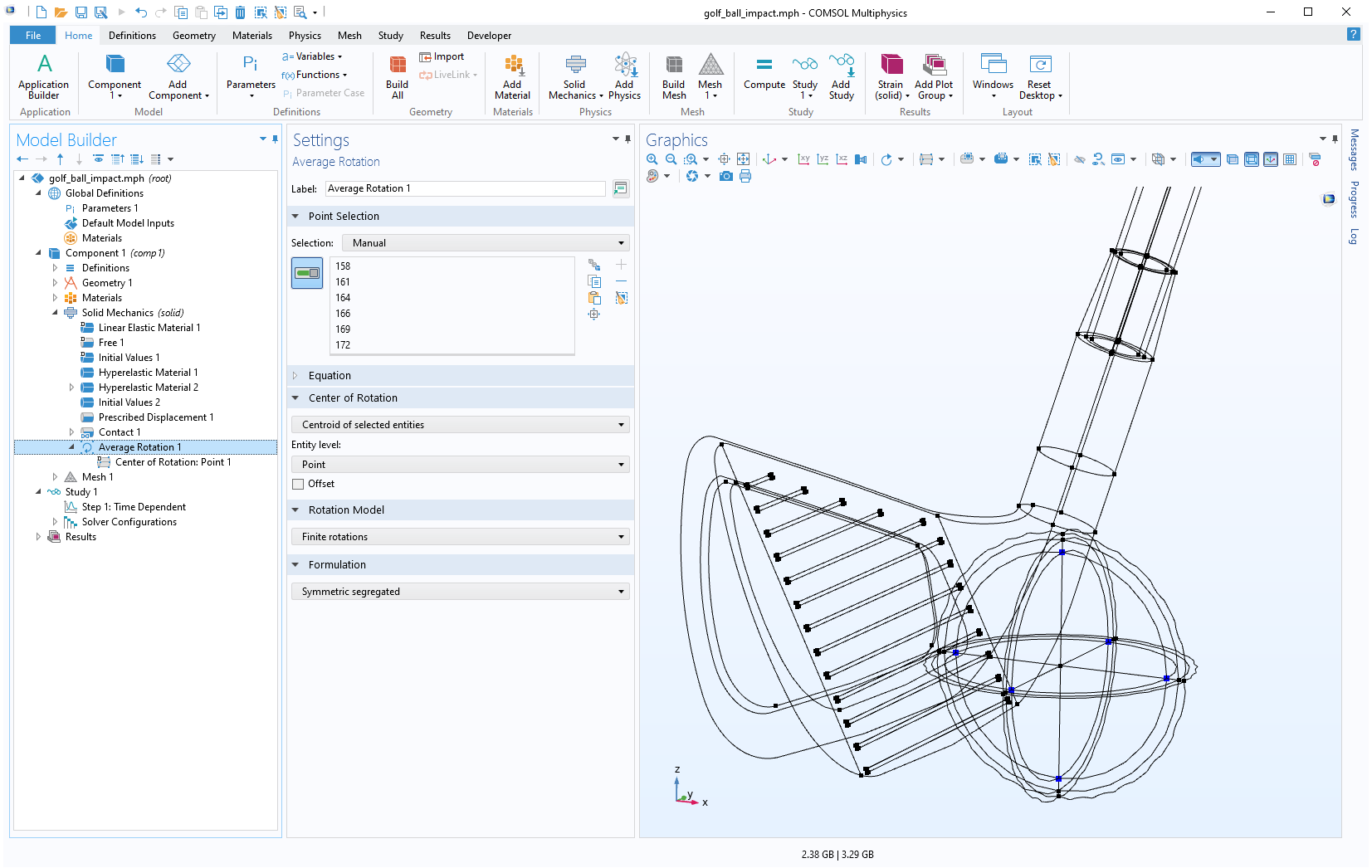
Selección de 6 puntos en una pelota de golf, para calcular las velocidades lineales y angulares promedio después del impacto.
Nuevos modelos tutoriales
|
Dynamics of a Cylindrical Roller Bearing |
Slider Crank Mechanism with Joint Clearance |
|
Modeling of Vibration and Noise in a Gearbox: Bearing Version |
|
5.5
NOVEDADES
En la versión 5.5 puede utilizarse el módulo sin Structural Mechanics Module. Se ha incluido el modelado de conjunto de ruedas dentadas de cadena de rodillos y la creación automática de dominios rígidos y engranajes a partir de la geometría.
Multibody Dynamics Module, una extensión de COMSOL Multiphysics®
En la versión 5.5, el módulo Multibody Dynamics Module es una extensión de COMSOL Multiphysics® y ya no requiere Structural Mechanics Module. Este cambio hace que el modelado de dinámica multicuerpo, incluyendo los acoplamientos multifísicos a electromagnetismo, flujo de fluidos, acústica, transferencia de calor, etc..., sea más fácilmente accesible para un grupo más grande de usuarios.
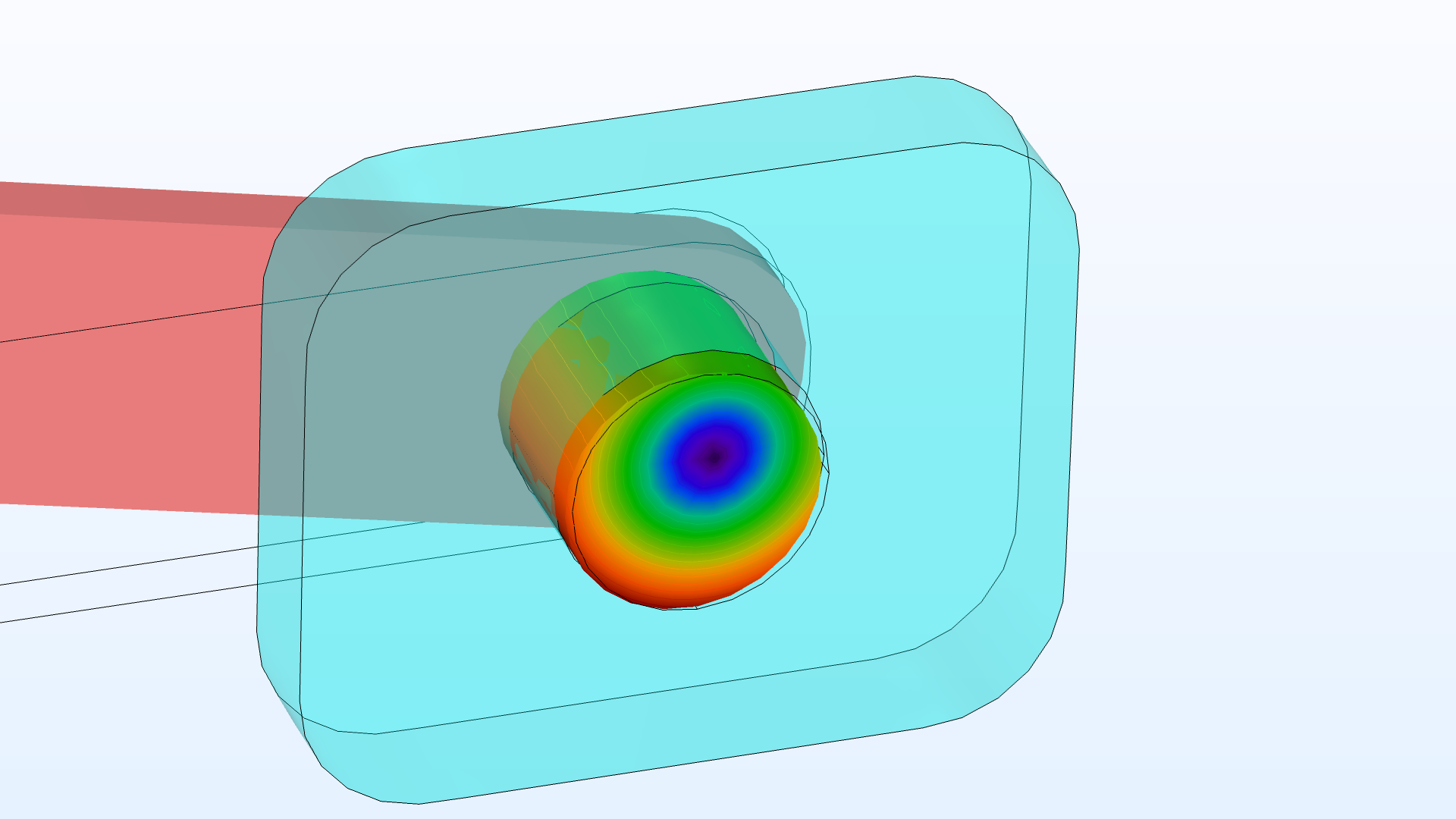
Para un modelado de dinámica multicuerpo más avanzado, el módulo Structural Mechanics Module todavía es de utilidad, ya que proporciona acceso a funcionalidad de mecánica de estructuras más avanzada, como condiciones de contorno más sofisticadas para estructuras elásticas, elementos de cáscara y viga, así como los módulos de extensión del Structural Mechanics Module. El modelo Electrodynamics of a Power Switch - Multibody Version muestra el uso de Multibody Dynamics Module, sin el Structural Mechanics Module, en combinación con el módulo AC/DC Module.
Versión multicuerpo del modelo de la electrodinámica de un conmutador de potencia magnético.
Modelado de rueda dentada de cadena de rodillos
Modelar ruedas dentadas de cadena de rodillos ahora es posible con la adición de una nueva funcionalidad Chain Drive, que proporciona un marco de trabajo para configurar estos modelos. Los piñones y enlaces de cadenas pueden definirse independientemente como rígidos o elásticos. Existe un botón Create Links and Joints que añade automáticamente todo lo requerido por los nodos Rigid Domain, Attachment y Hinge Joint. El contacto entre el piñón y los enlaces de la cadena pueden modelarse utilizando un método basado en el centro del rodillo o un método basado en la malla. También pueden modelarse bujes y pérdidas en las uniones.
Adicionalmente, para facilitar el modelado de transmisiones por cadena, se han añadido nuevas partes de geometría a la Librería de Partes. Existen componentes individuales de un piñón o una cadena de rodillo, así como una montaje completo de de piñón de cadena de rodillos. Para hacer la configuración del modelo más rápida y fácil, las partes están muy parametrizadas, utilizando la funcionalidad de color de selección y proporcionando selecciones como enlaces, contornos de las uniones, y contornos de contacto a la interfaz física. Entonces, en el nodo Chain Drive todas las selecciones relevantes son asignadas automáticamente cuando se selecciona una parte geométrica de cadena.
Puede verse todo esto en los modelos Stress Analysis of a Roller Chain Sprocket Assembly y Dynamics of a Roller Chain Sprocket Assembly.
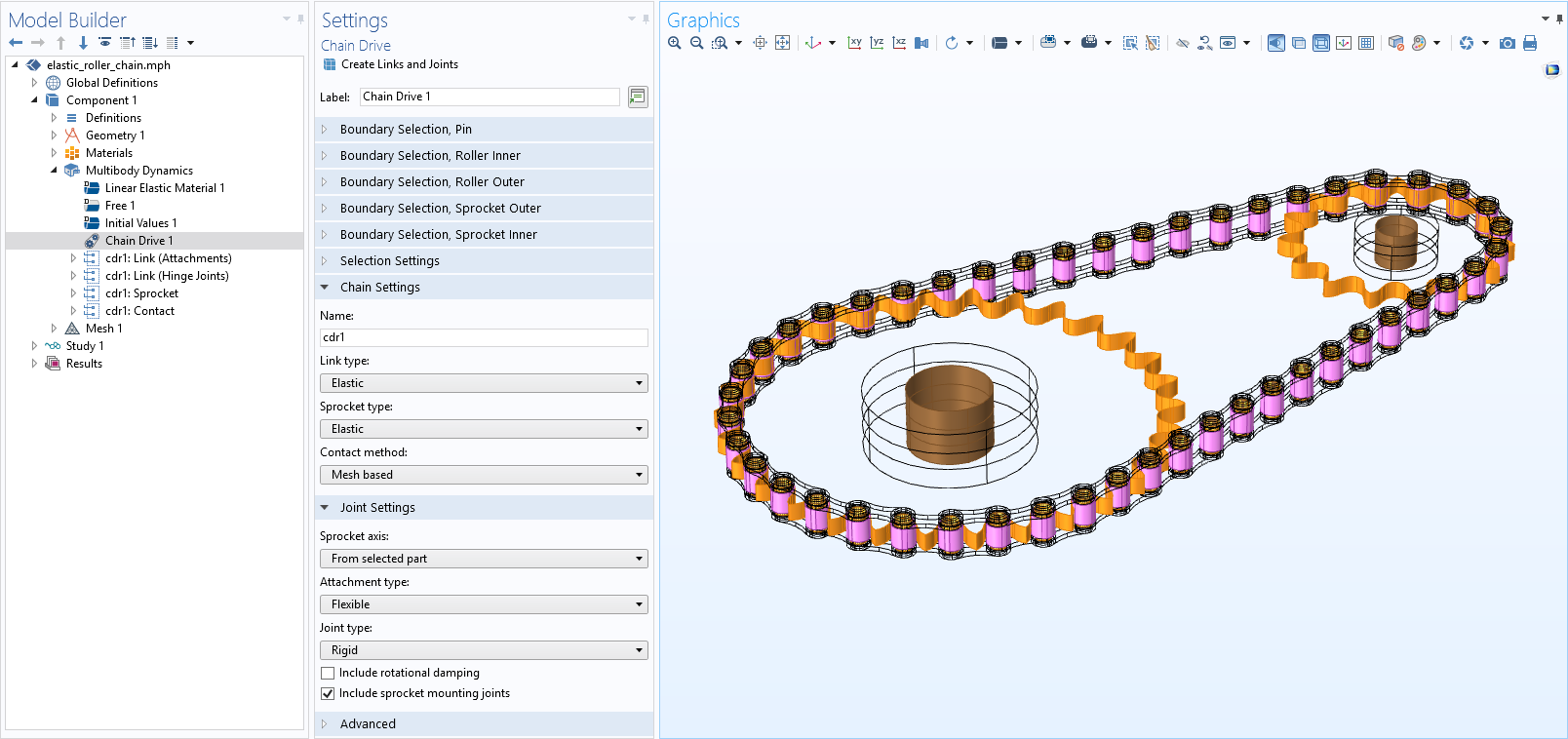
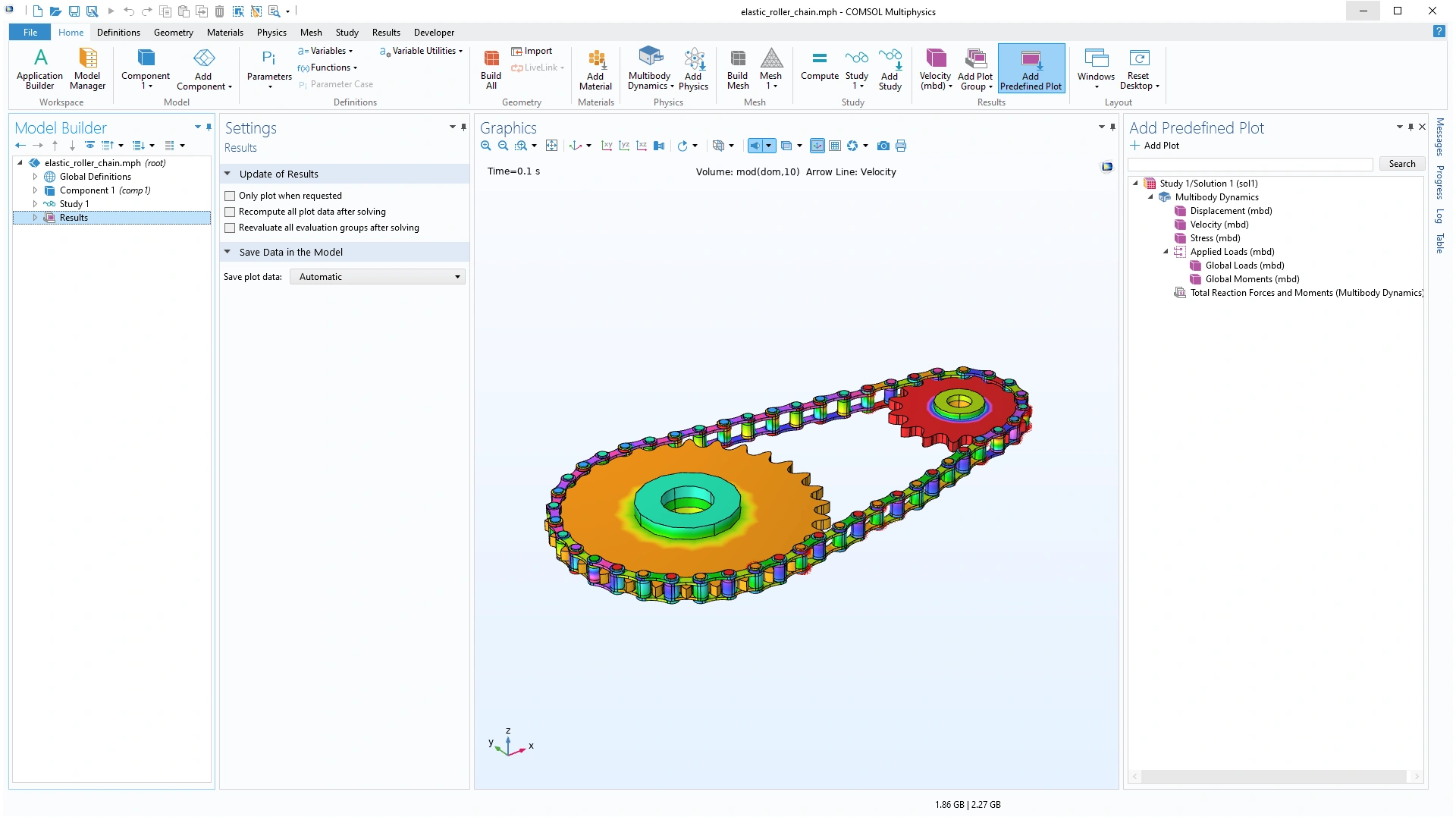
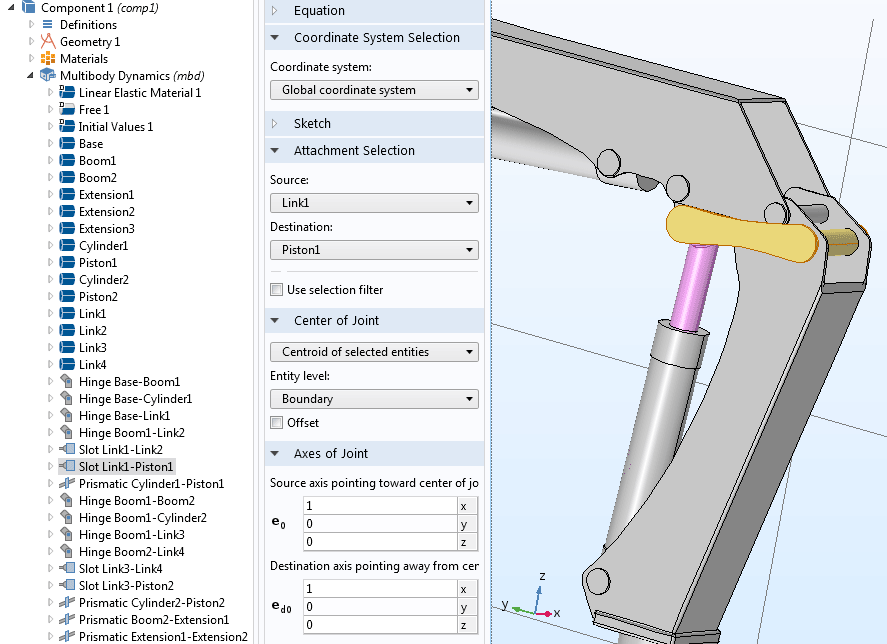
Modelo de un conjunto de piñón de cadena de rodillos elásticos con un piñón que acciona otra rueda dentada que tiene una carga externa. En la ventana Configuración se ve un nodo Chain Drive y sus diversas configuraciones. La geometría del modelo con límites de contacto resaltados se ve en la ventana Gráficos.
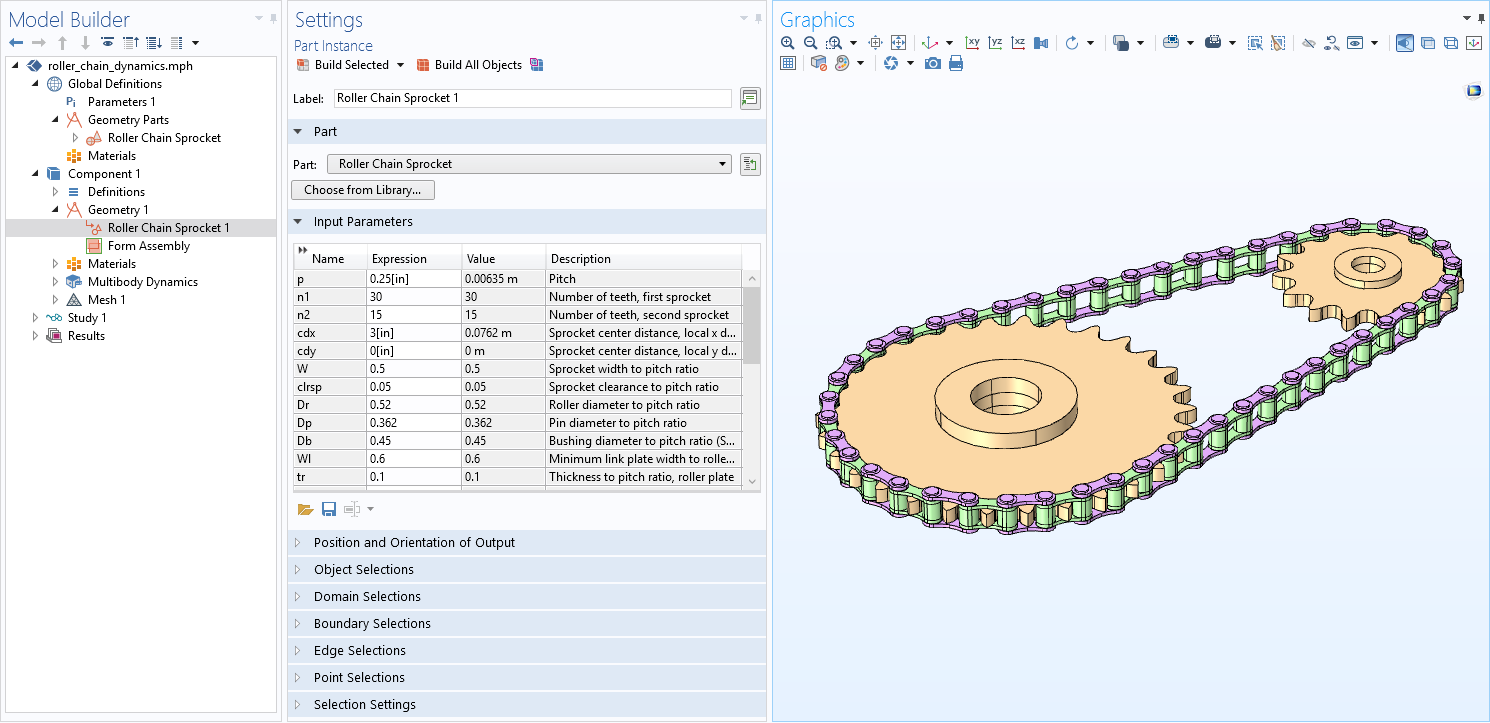
Parte de la geometría de un conjunto de piñón de cadena de rodillos en 3D para el paso, número de dientes en las ruedas dentadas, distancia al centro y otros parámetros especificados. Los diferentes colores muestran ruedas dentadas (amarillo), placas de rodillos (verde) y placas de pasador (rosa).
Configuración del modelo automatizada
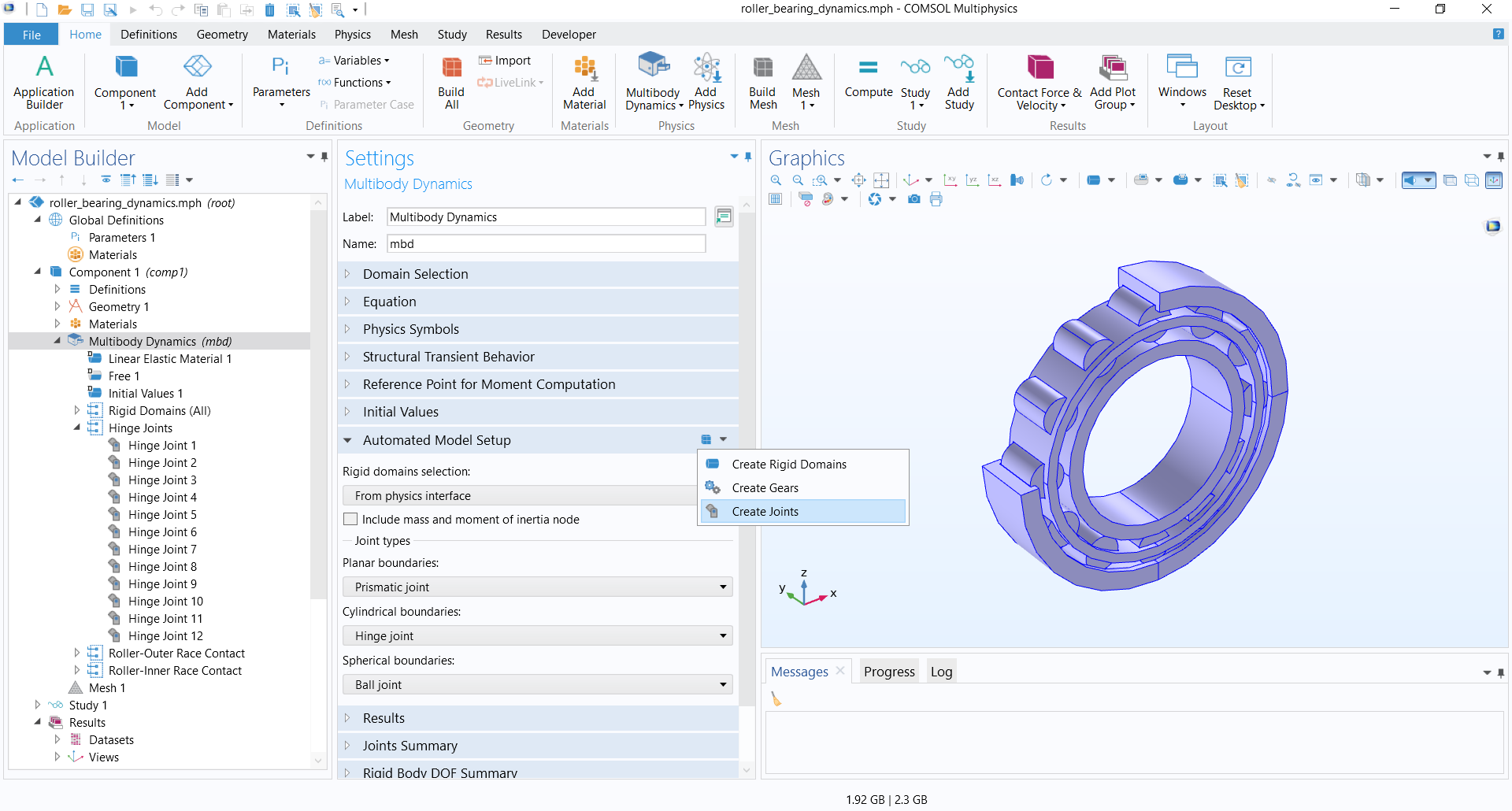
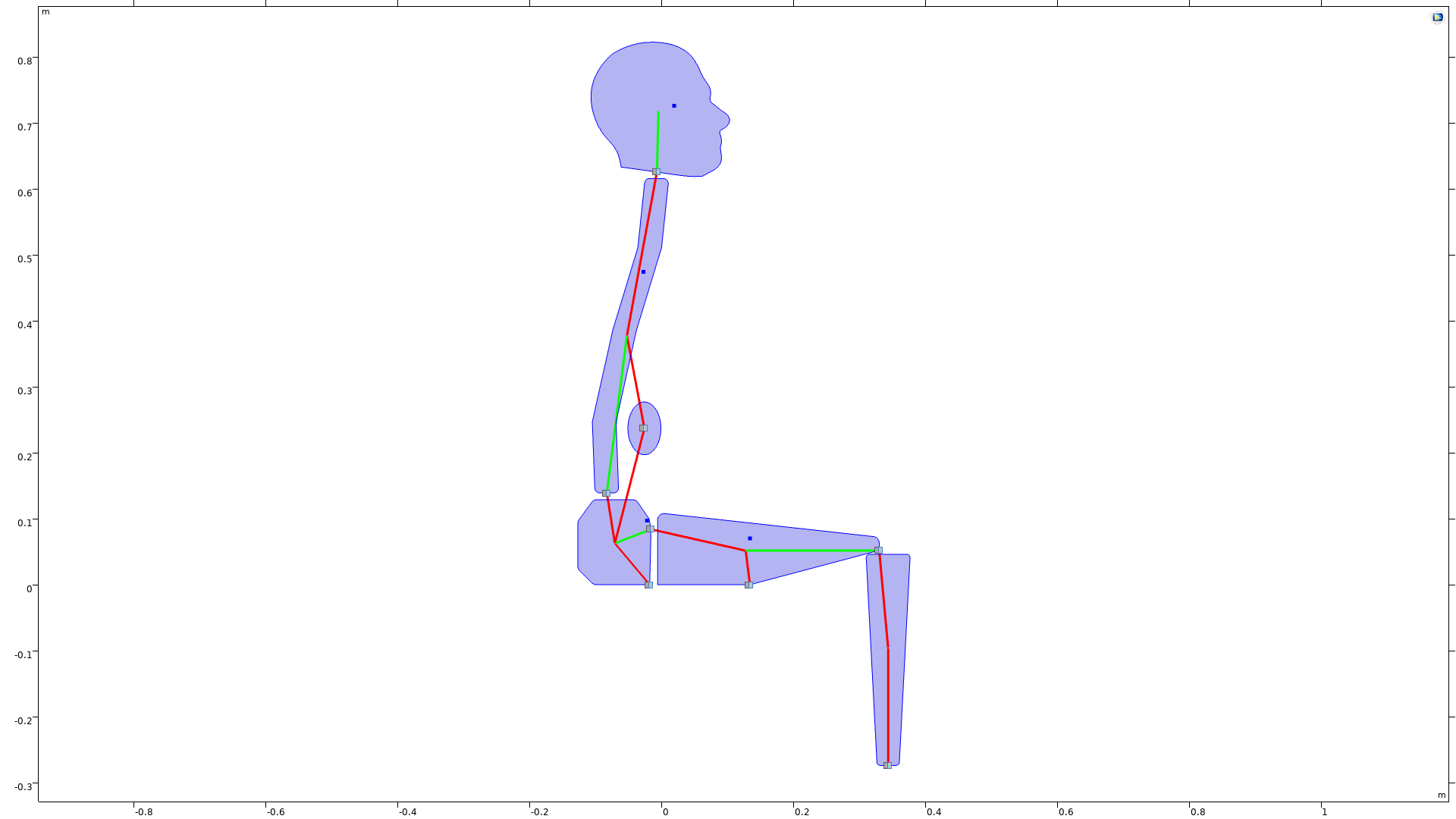
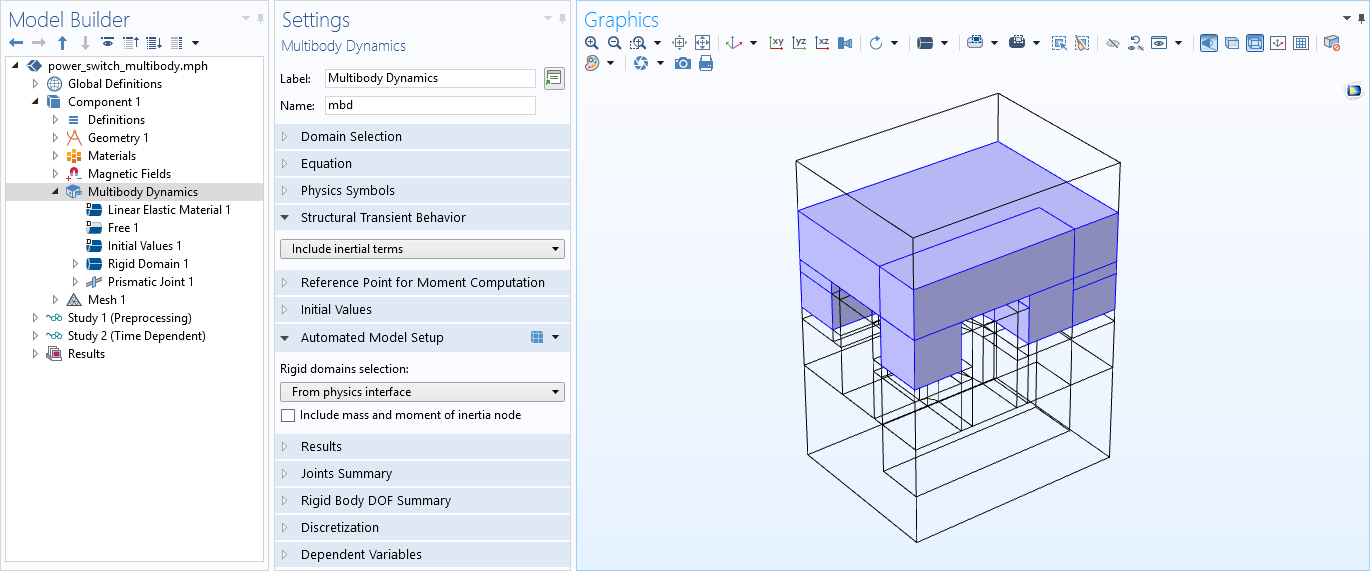
Para grandes sistemas multicuerpo rígidos, se ha añadido una nueva sección llamada Automated Model Setup en el nodo de la interfaz Mutlibody Dynamics para automaticamente generar nodos físicos basados en la información geométrica. Utilizando el botón Create Rigid Domains se generan nodos de dominio rígido para desconectar geométricamente objetos ya sea en la selección física completa o en un subconjunto. También puede marcarse una casilla para incluir automáticamente subnodos Mass and Moment of Inertia. Esta funcionalidad se muestra en los modelos Three-Cylinder Reciprocating Engine y Biomechanical Model of the Human Body in a Sitting Posture.
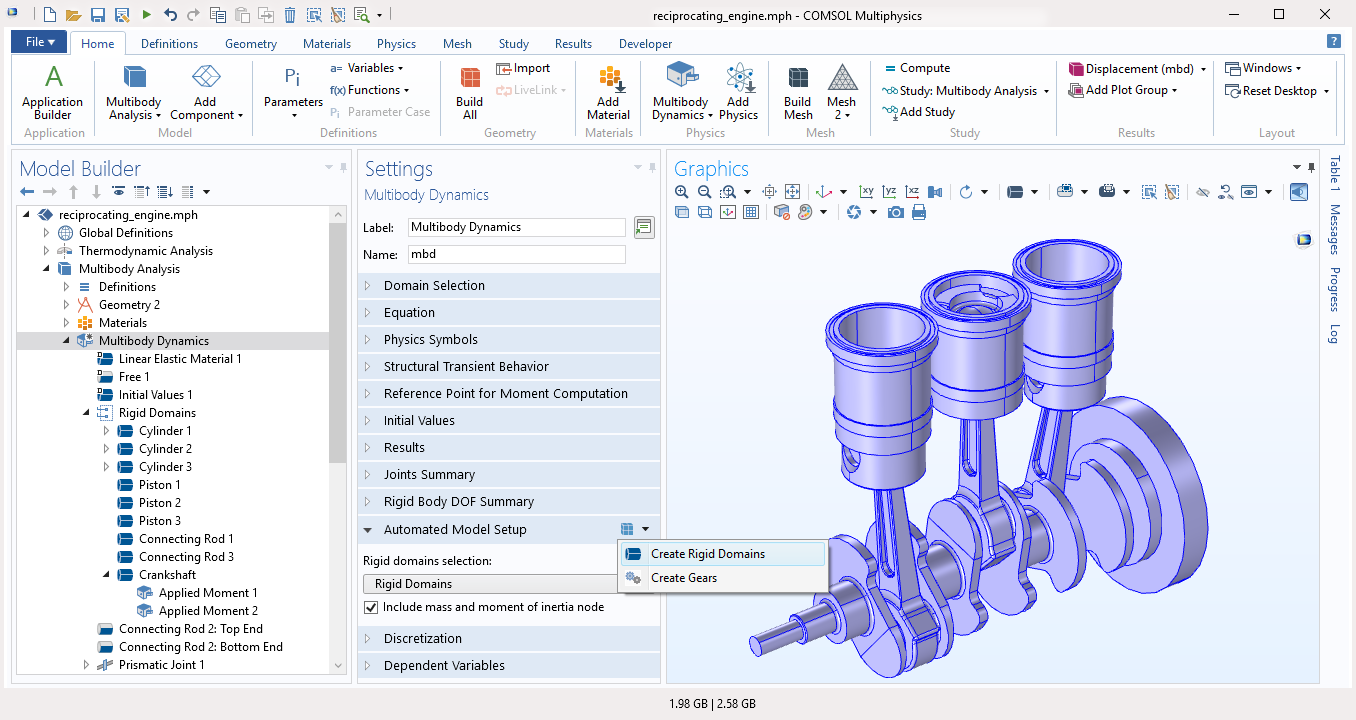
Modelo de un motor alternativo de tres cilindros donde todos los componentes rígidos se agregan a la física utilizando la nueva funcionalidad Create Rigid Domains.
También puede utilizarse la funcionalidad de configuración del modelo automatizada para crear engranajes a partir de información geométrica. Utilizando el botón Create Gears, se generan diferentes nodos de engranaje correspondientes a cada parte gear presente en la geometría. Todos los parámetros del engranaje, como el número de dientes, diámetro del paso, ángulos de presión, centro del engranaje, y eje del engranaje son entrados automáticamente en los ajustes para los nodos de engranaje autogenerados. Utilizando esta funcionalidad, se evita entrar parámetros de engranajes dos veces, en la geometría y los ajustes de la física, ayudando así a acelerar la configuración del modelo de sistemas multicuerpo engranados. Esta funcionalidad se muestra en los modelos Dynamics of Helical Gears and Forces y Moments of Bevel Gears.
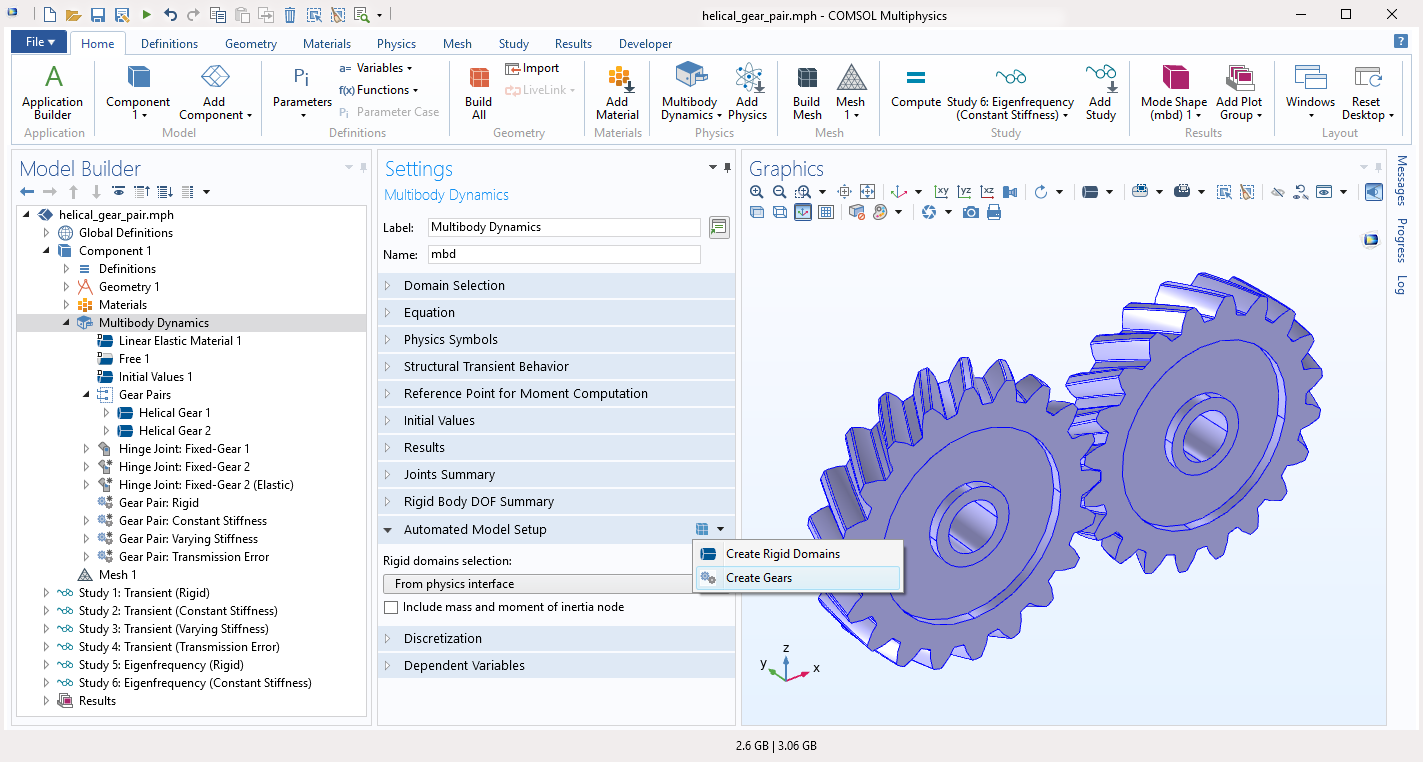
Los engranajes helicoidales se agregan a este modelo automáticamente, utilizando la nueva funcionalidad Create Gears. Todos los parámetros del engranaje se rellenan automáticamente en los nodos del engranaje después de tomar los valores de la parte del engranaje correspondiente en la geometría.
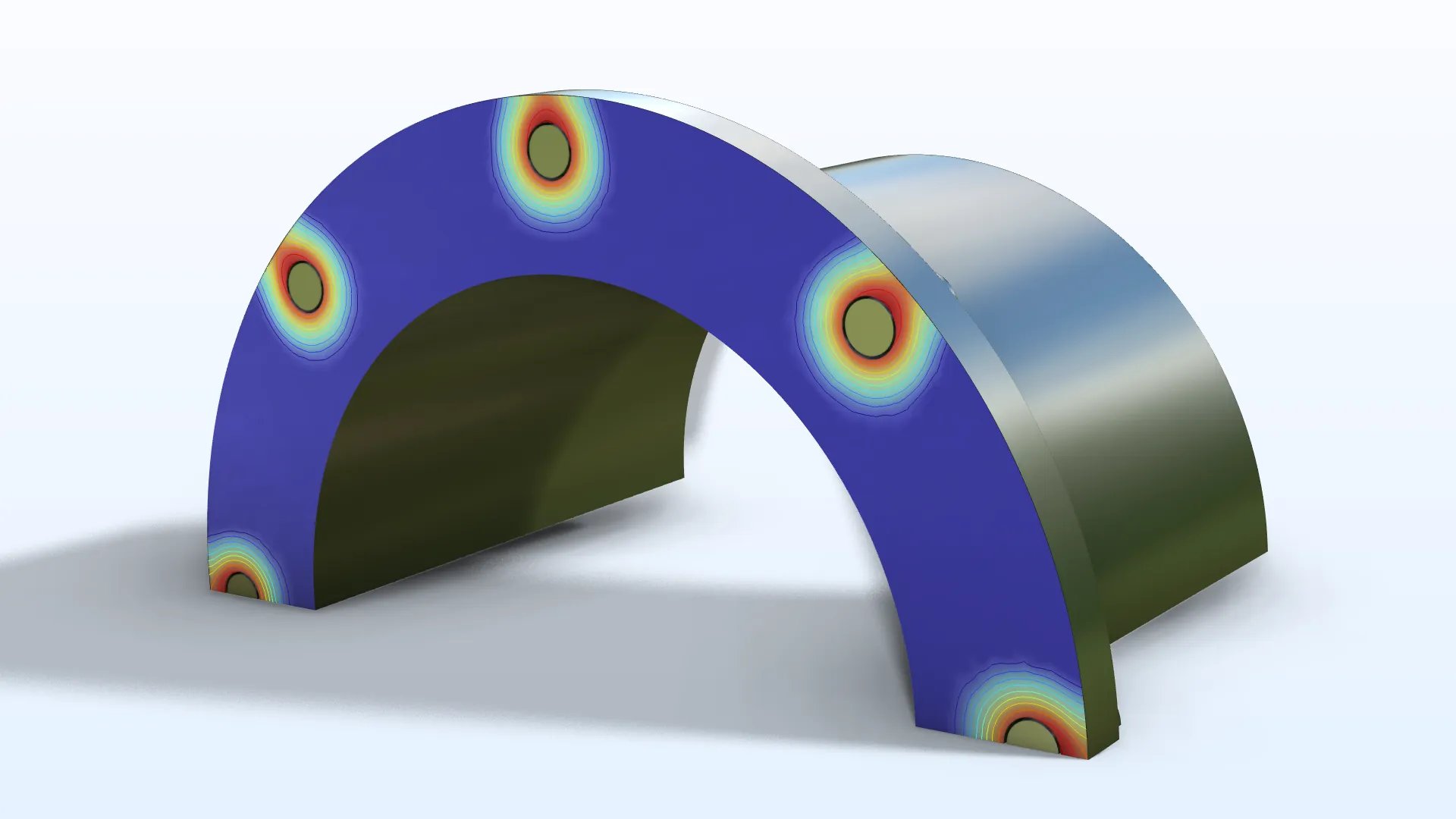
Extensiones al modelado de contacto
La funcionalidad de modelado de contacto ha sido ampliada para más interfaces físicas, ahora disponible en: Solid Mechanics, Multibody Dynamics, Shell (nuevo), Layered Shell (nuevo), y Membrane (nuevo). Adicionalmente se peude analizar contacto entre contornos modeladndo con dos cualquiera de estas interfaces. Similarmente el contacto puede modelarse entre un contorno en el que esté activa cualquiera de estas interfaces y una parte mallada arbitrariamente , incluso si esta última no tiene física asignada.
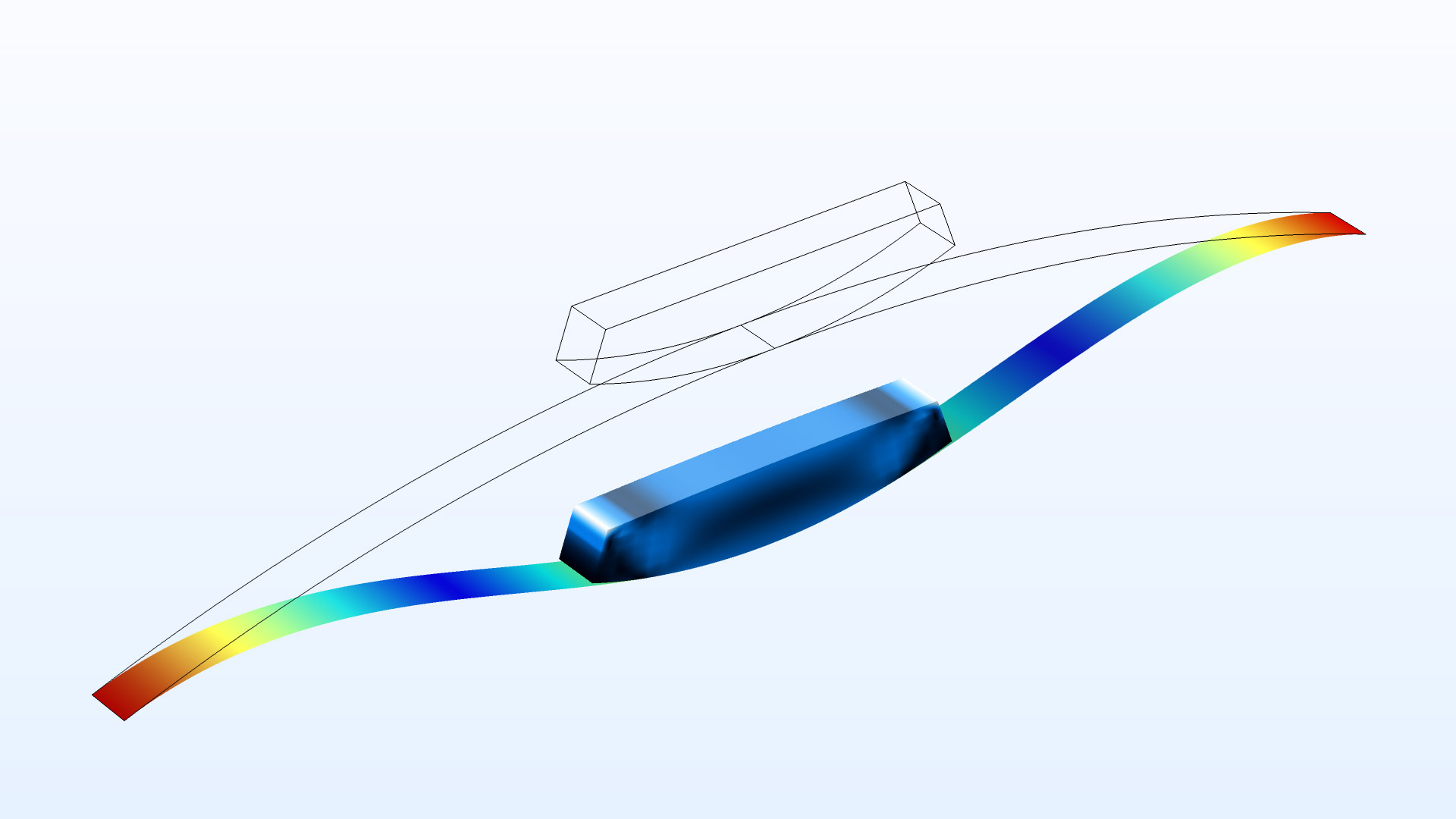
Un bloque sólido presiona sobre un arco modelado con elementos de cáscara.
Mecánica de sólidos en dominios rotativos
Cuando se modelan problemas multifísicos en sistemas donde existe una mezcla de dominios estacionarios y rotativos, se puede utilizar la interfaz Solid Mechanics en una configuración de corotación, de forma que únicamente se modelen las deformaciones relativas a la rotación. Esto es mucho más eficiente que resolver los desplazamientos totales que incluyen grandes rotaciones globales. En muchos casos, es incluso posible utilizar una formulación lineal para el problema mecánico. Para tal fin, la funcionalidad Rotating Frame proporciona una superposición de la rotación del cuerpo rígido, y los desplazamientos relativos, para controlar la estructura espacial en el que loas otras interfaces físicas están operando.
Generador eléctrico donde el rotor se modela utilizando la interfaz Solid Mechanics. Los resultados muestran el campo magnético (izquierda) y tensiones (derecha).
Visualización de cargas
Las cargas mecánicas aplicadas ahora están disponibles como gráficos por defecto en todas las interfaces físicas de mecánica de estructuras. Los gráficos de cargas son dependientes de la solución, así que tanto las direcciones de flechas y colores son actualizados cuando un conjunto de datos se actualiza con una nueva solución. Incluso las cargas abstractas, como fuerzas y momentos aplicados a conectores rígidos y dominios rígidos se grafican en su verdadero punto de aplicación. Un nuevo tipo de flecha, utilizado para graficar momentos aplicados, ha sido introducido para esta funcionalidad. Más de 100 modelos se han actualizado con esta nueva funcionalidad.

Tres conjuntos de cargas graficadas en un modelo de un tubo.
5.4
NOVEDADES
Adjunto flexible
Ahora existe dos formulaciones de la funcionalidad Attachment: Rigid y Flexible. En la formulación por defecto todos los contornos seleccionados se comportan como se estuvieran conectados por un cuerpo rígido común. En algunos casos este comportamiento resulta en una rigidez indeseada o en tensiones locales no realistas. Para evitar esto, se puede cambiar a una formulación flexible donde las restricciones se aplican únicamente en un sentido promedio.
Interacción fluido-estructura
Se han añadido dos interfaces predefinidas para acoplamiento de la interfaz Multibody Dynamics con flujo de fluido: Fluid-Multibody Interaction y Fluid-Multibody Interaction, Assembly. La primera utiliza un acoplamiento multifísico estándar Fluid-Structure Interaction, y se utiliza cuando la geometría está en el estado Union.
Para modelos dinámicos multicuerpo, sin embargo, es más común que se utilice el estado Assembly cuando se construye la geometría. En este caso debe utilizarse la interfaz Fluid-Multibody Interaction, Assembly. Cuando se invoca, genera el nuevo acoplamiento multifísico Fluid-Structure Interaction, Pair.
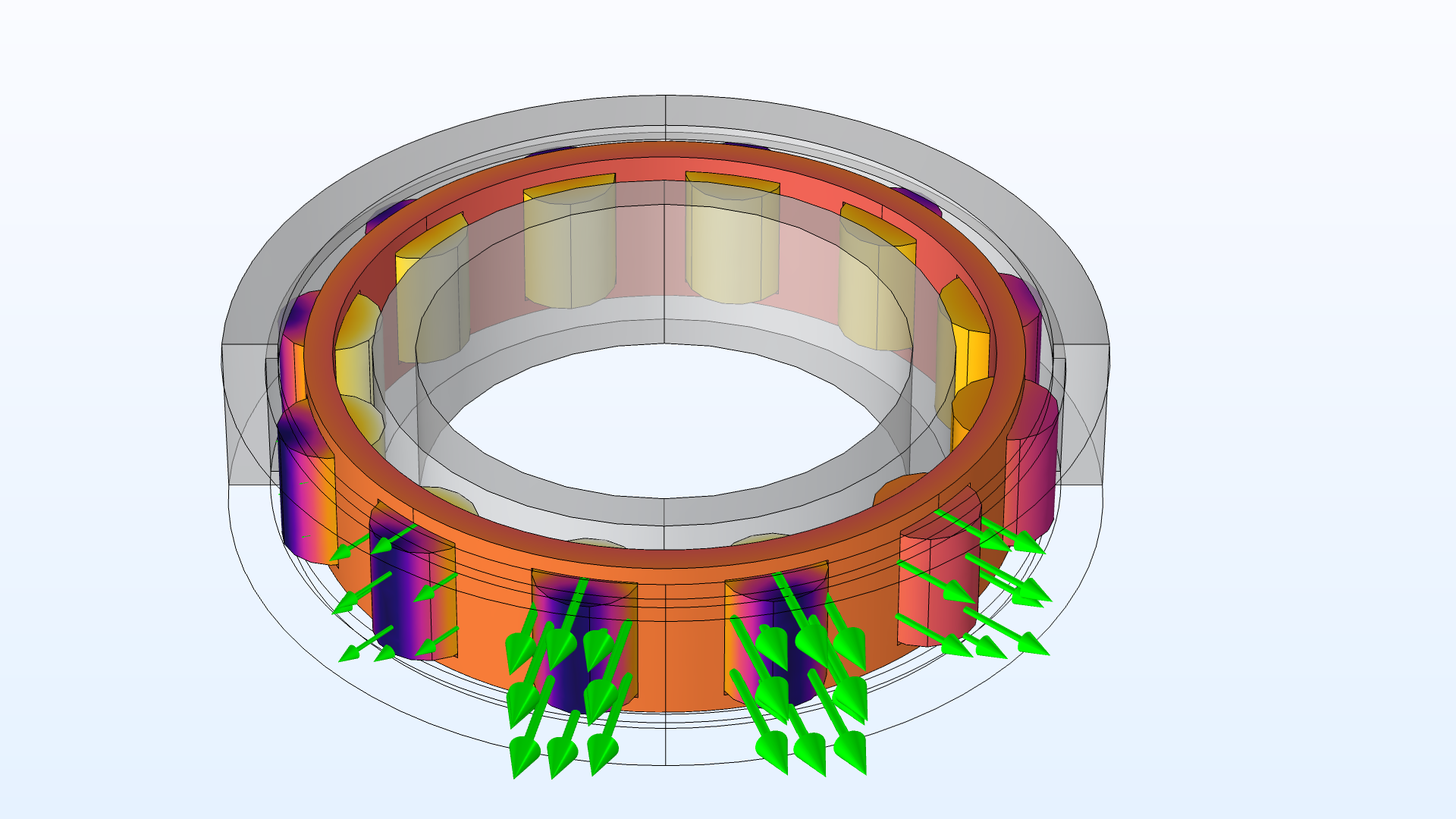
Cojinetes de elementos rodantes
Se han añadido modelos para seis tipos cojinetes de elementos rodantes a la interfaz Multibody Dynamics:
- Deep groove ball bearing
- Angular contact ball bearing
- Self-aligning ball bearing
- Spherical roller bearing
- Cylindrical roller bearing
- Tapered roller bearing
Cada cojinete puede tener una fila simple o doble de elementos rodantes.
El modelo de cojinete incluye una representación no lineal de la rigidez del contacto entre los elementos rodantes y los anillos interno y externo. Para incluir estos cojinetes en el modelo, hay que añadir el nodo Radial Roller Bearing, que requiere el módulo Rotordynamics Module.
Marco local para presentación de resultados
Ahora puede evaluarse y graficar desplazamientos relativos para cualquier dominio rígido, adjunto o engranaje. En la sección Results de los ajustes de la iterfaz Multibody Dynamics, se selecciona cualquier de esos objetos de la Body defining reference frame list. Entonces se tendrá acceso a las variables para los desplazamientos y velocidades relativos de ese objeto.
Condición de rodamiento con orientación normal analítica
La restricción de rodamiento por defecto actúa a lo largo de una normal a los contornos seleccionados. La normal se calcula numéricamente. Para un cierto nodo de malla, esta dirección se mantiene constante durante el análisis., por lo que no puede respresentar un deslizamiento finito sobre un contorno curvado. Ahora, sin embargo se puede prescribir que el contorno se deslice sobre una superficie analítica. Existen dos situaciones donde puede ser necesario:
- La representación de la geometría o malla del contorno real es imperfecta. Esto puede llevar a un bloqueo inesperado de la deformación, ya que las normales calculadas no tienen las direcciones pretendidas.
- En un análisis geométricamente no lineal, el uso de una superficie analítica posibilita modelar también deslizamientos finitos a lo largo de contornos curvados.
En los ajustes del nodo Roller, se selecciona una Normal orientation, que puede ser Automatic, Plane, Cylinder, o Sphere.
5.3a
NOVEDADES
Esta versión trae una nueva interfaz física para modelar sistemas mecánicos concentrados y un nuevo tipo de articulación Cam-Follower
Interfaz física de Sistema mecánico concentrado
Con la nueva interfaz física Lumped Mechanical System se pueden modelar sistemas mecánicos discretos en un formato no gráfico, en términos de masa, muelle, amortiguador y otros. Esto es de especial utilizada para crear modelos de circuitos equivalentes en sistemas electromecánicos como altavoces. La interfaz puede añadirse a componentes de alguna dimensión desde 0D a 3D, y se pueden conectar componentes concentrados a modelos de elementos finitos en cualquier dimensión.
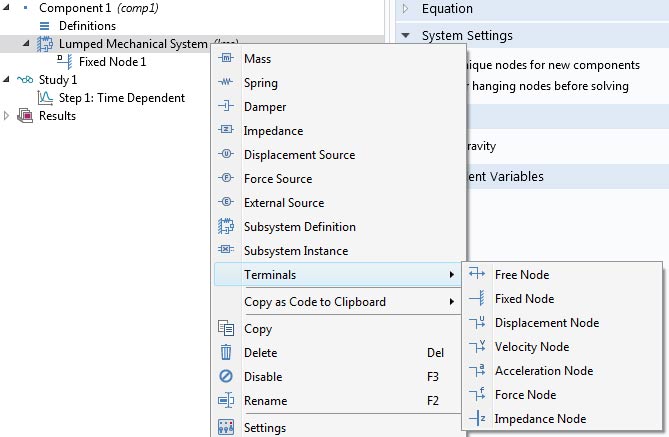
Las funcionalidades disponibles en la interfaz Lumped Mechanical System.
Articulación Cam-Follower
La nueva articulación Cam-Follower en la interfaz Dinámica Multicuerpo se utiliza para modelar una situación donde un punto en un objeto sigue el contorno de otro objeto. Esta nueva funcionalidad facilita mucho más que antes modelar árboles de levas y mecanismos similares. Las partes cam y follower pueden ser rígidas o flexibles. En conclusión, con esta funcionalidad, también se pueden obtener fuerzas de contacto entre dos partes.
Un mecanismo cam-follower modelado con la nueva articulación del mismo nombre.
Gráficos por defecto mejorados
Los gráficos por defecto en las interfaces físicas de mecánica estructural han sido actualizados para producir visualizaciones más informativas. Los tutoriales de la Biblioteca de aplicaciones se han actualizado consecuentemente. Alguno de los cambios más prominentes que se encontrarán son los siguientes:
- La tabla de colores para los gráficos de deformación von Mises es RainbowLight
- La tabla de colores para gráficos de forma de modos, para estudios de frecuencias propias y deformación lineal, es AuroraBorealis
- Los gráficos de forma de modos tiene la leyenda apagada para enfatizar que la amplitud de un modo no tiene un significado físico
- La tabla de colores para los gráficos de fuerza de sección en las interfaces Viga y Armazón es Wave, con un rango de colores simétrico
- Esto posibilita distinguir inmediatamente entre tensión y compresión, por ejemplo
- En análisis de contacto, se ha añadido un gráfico de presión de contacto, como un gráfico lineal (2D) o un gráfico de niveles (3D)
- El gráfico por defecto para Linealización de tensión ahora tiene una leyenda para los gráficos
- El gráfico de geometría no deformada por defecto, producido por la interfaz Lámina, tiene nuevos colores
- Cuando se utiliza un modelo de material como plasticidad o arrastre, un gráfico de niveles del valor de la deformación relevante, como la deformación plástica efectiva, se superpone al gráfico de tensión
- Aplicable para el módulo Nonlinear Structural Materials Module y el Geomechanics Module
- En la interfaz Fatig, la tabla de colores Traffic se utiliza para ciclos de fallo predecidos y factores de uso
- Aplicable para el módulo de fatiga
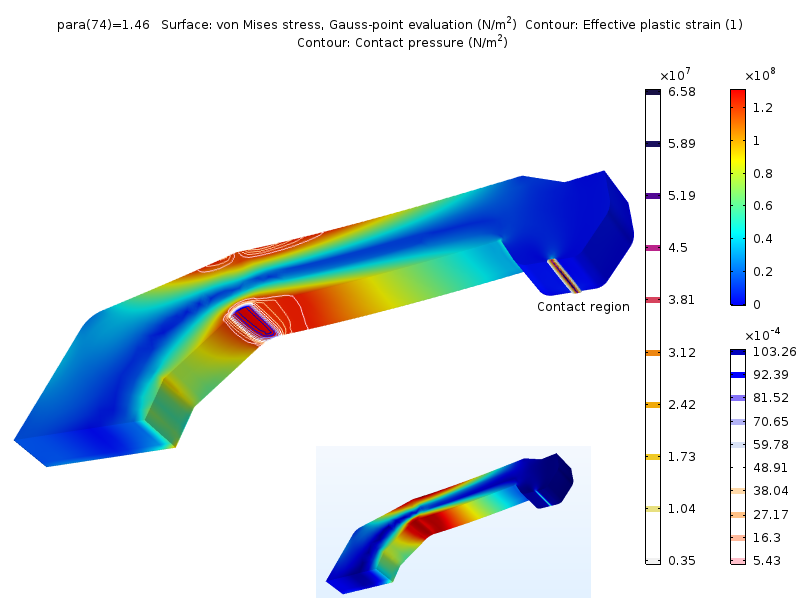
En este ejemplo, se pueden ver colores más brillantes en el gráfico de tensiones (tabla de colores RainbowLight), y, por defecto, se han añadido niveles de deformación plástica y de presión de contacto. Por comparación, Para su comparación se muestra un gráfico por defecto de la versión COMSOL Multiphysics® 5.3 del mismo modelo.
Nuevo modelo tutorial: Modeling a radial cam-based valve-opening mechanism
En este modelo tutorial, se puede estudiar un mecanismo de apertura de válvula accionada por resorte que tiene un balancín y una leva radial. Todos los componentes del sistema se modelan como rígidos y están conectados a través de articulaciones prismática, bisagra y espacial, así como la nueva articulación cam-follower. Se realiza un análisis transitorio para varios valores de rigidez del muelle. La salida del modelo incluye, entre otras cosas, la velocidad del seguidor de leva, la aceleración del seguidor, la fuerza de conexión del seguidor de leva y la torsión requerida.
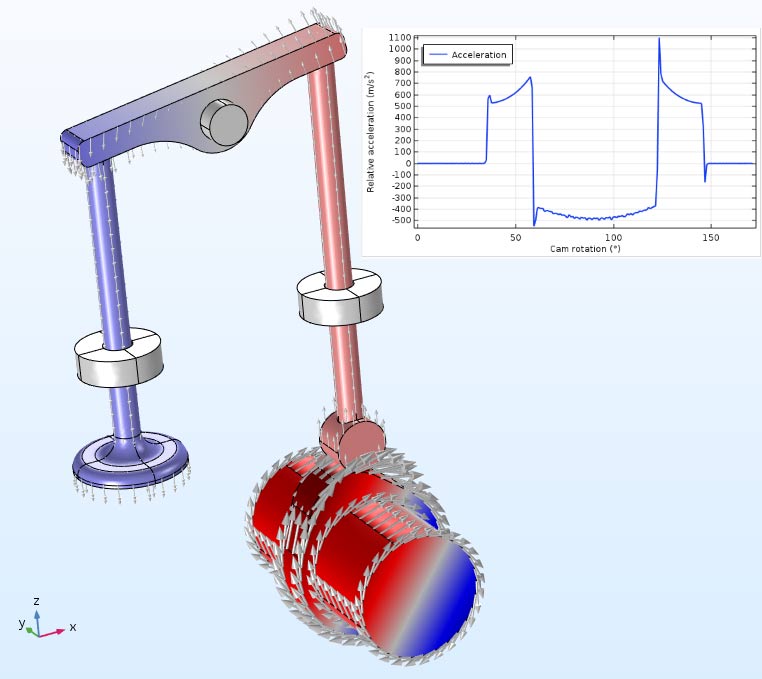
El gráfico de superficie muestra la velocidad vertical y las flechas muestran el campo de velocidad en el componente. En el gráfico, se muestra el histórico de la aceleración del seguidor.
Nuevo modelo tutorial: Lumped model of a vehicle suspension system
En este tutorial, un sistema de suspensión de un vehículo con 11 grados de libertad es analizado con un modelo concentrado. Los nodos de Masa, Muelle y Amortiguamiento de la interfaz Lumped Mechanical System se utilizan para modelar las ruedas, incluyendo sistemas de suspensión, así como los asientos con un pasajero. El cuerpo del vehículo, con 3 grados de libertad, se modela como un cuerpo rígido en la interfaz de Dinámica multicuerpo. Se realiza un análisis transitorio para calcular el movimiento del vehículo y los niveles de vibración del asiento para un perfil de carretera dado.
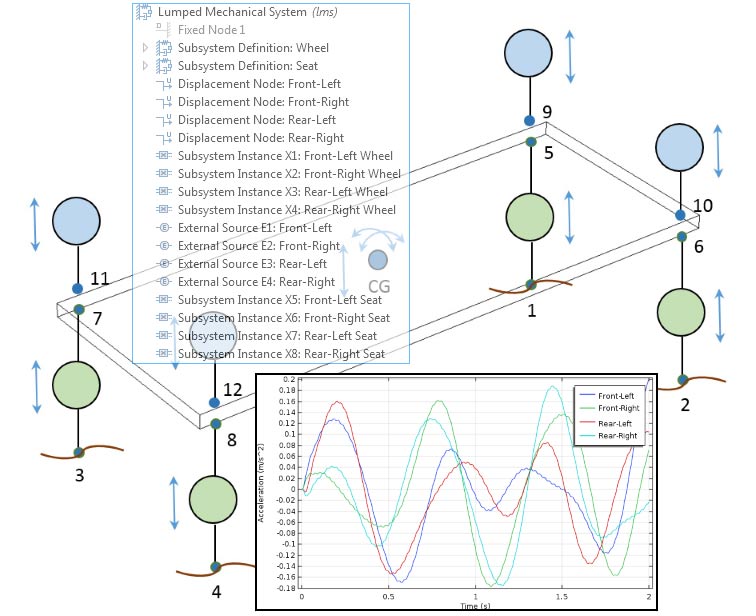
El modelo conceptual del coche muestra las ruedas y asientos (fondo), modelados a través de los correspondientes nodos de la interfaz Lumped Mechanical System (transparente), para calcular las aceleraciones en los cuatro asientos (delante).
Nuevo modelo tutorial: Lumped model of a human body
En este modelo, se puede analizar un modelo concentrado de un cuerpo humano con 5 grados de libertad. Los nodos Masa, Muelle y Amortiguación de la interfaz Lumped Mechanical System se utilizan para modelar el cuerpo humano y la interfaz zapato-tierra. Primero, se realiza un estudio de frecuencias propias para encontrar las frecuencias naturales del sistema. Entonces se efectúa un análisis de respuesta frecuencial para calcular la respuesta del sistema para una excitación base especificada.
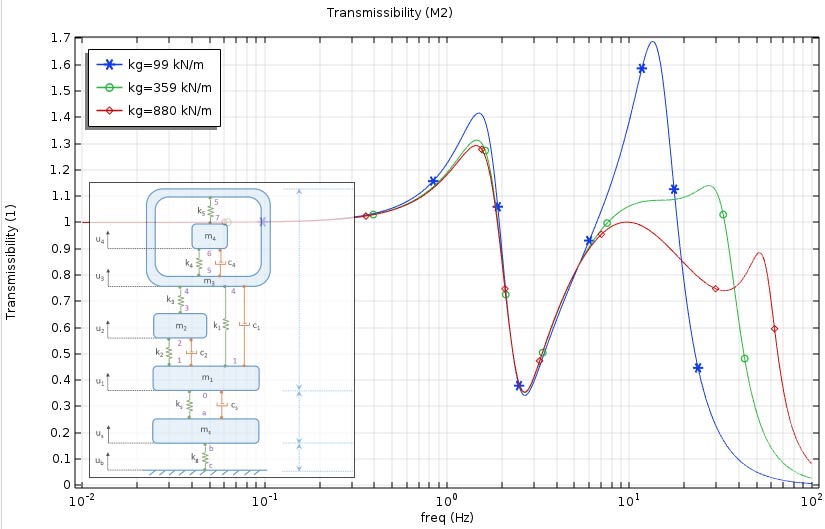
Transmisibilidad de vibraciones desde el suelo al cuerpo inferior para tres tipos de valores de rigidez del suelo diferentes.
Modelo tutorial actualizado: Lumped Loudspeaker Driver Using Lumped Mechanical System
Este es un modelo de un altavoz de bobina móvil donde una analogía de parámetros concentrados representa el comportamiento de los componentes eléctricos y mecánicos del altavoz. Los parámetros Thiele-Small (parámetros de pequeña señal) sirven como entrada al modelo concentrado. En este modelo, los componentes mecánicos del altavoz, como la masa móvil, el cumplimiento de la amortiguación y las pérdidas mecánicas de la amortiguación se modelan utilizando la interfaz Sistema mecánico concentrado.
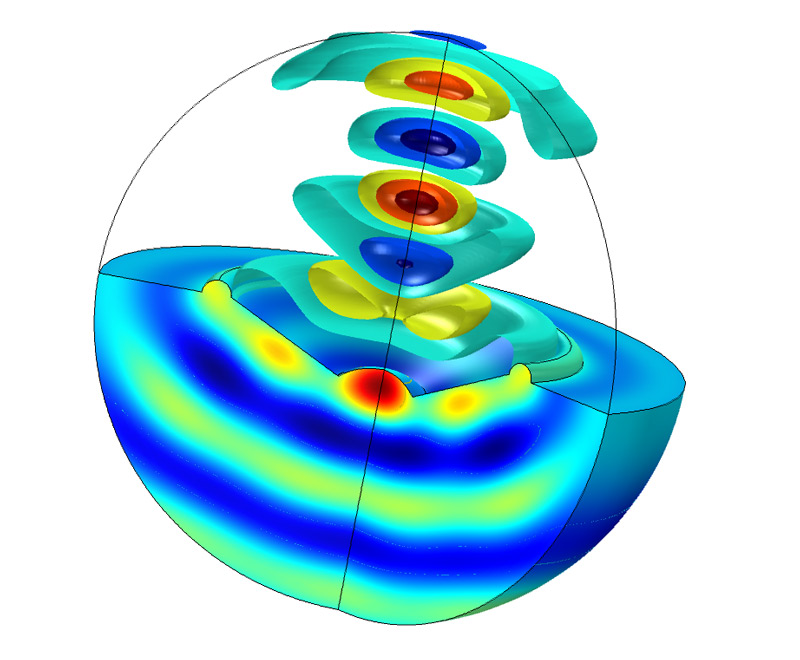
Campo de presión representado como isosuperficies (por encima del cono del altavoz) y como gráfico de superficie (debajo del cono del altavoz).
5.3
NOVEDADES
Para los usuarios del Multibody Dynamics Module, COMSOL Multiphysics® versión 5.3 ofrece un modelo tutorial que combina dinámica multicuerpo con acústica para simular el ruido en una caja de engranajes así como un tutorial que combina el módulo de Dinámica multicuerpo con el módulo AC/DC para simular un motor de inducción.
Selecciones resaltadas en análisis de dinámica multicuerpo
Cuando se trabaja con montajes complejos en la interfaz de Dinámica multicuerpo, pueden existir muchas articulaciones conteniendo cada una de ellas la selección de dos dominios rígidos o adjuntos. Cuando se selecciona un nodo Articulación en el árbol del modelo, los objetos seleccionados ahora son resaltados automáticamente en la ventana Gráfica. Esto proporciona información sobre la corrección de las selecciones de la fuente y el destino. De forma similar, los dos engranajes en un nodo Gear Pair y las dos partes unidas en un nodo Amortiguador del muelle también será resaltado cuando se selecciones los correspondientes nodos.
Los dos dominios rígidos que están conectados por una articulación de bisagra son resaltados cuando el respectivo nodo Articulación es seleccionado.
Método de penalización para cálculo de las fuerzas de articulación
No es inusual para un modelo estar sobrelimitado en sistemas de cuerpos rígidos. Un método de penalización para aplicar restricciones de articulación ha sido añadido para manejar esta situación. Cuando este método es aplicable es posible determinar las fuerzas de articulación. Más aún, las fuerzas de articulación entre cuerpos rígidos no se calculan por defecto para reducir el riesgo de tener problemas numéricos causados por los sobrelímites.
Tipo de estudio de modelo de orden reducido modal
El tipo de estudio Modal Reduced Order Model ahora está soportado en la interfaz Dinámica multicuerpo. Es útil para extraer matrices del sistema representadas en una base modal para grandes modelos dinámicos multicuerpo.
Adjuntos en cuerpos rígidos
Ahora se puede utilizar una opción Attachment en un dominio rígido, facilitando conmutar entre una representación rígida y una representación elástica. Esto evita tener que cambiar y reseleccionar el nodo articulación en el dominio respectivo y la ventana de Ajustes.
Discretizar mediante funciones de forma serendipia
Cuando se modelas partes flexibles en la interfaz de Dinámica multicuerpo, se puede escoger discretizar mediante funciones de forma serendipia. Esto reduce el número de grados de libertad al utilizar mallas estructuradas con elementos de alto orden en dominios flexibles.
Supresión automática de movimiento de cuerpos rígidos
En casos donde las cargas están autoequilibradas, la localización real de donde son situadas las restricciones requeridas no es relevante. Los modelos autoequilibrados pueden ser analizados siempre que las especificaciones de las restricciones cumplan las siguientes condiciones: los movimientos de los cuerpos rígidos no son posibles y no se introducen fuerzas de reacción. Ahora, la nueva condición de Supresión de movimiento rígido puede utilizarse para estos tipos de análisis. Esta funcionalidad automáticamente aplica un conjunto de restricciones adecuadas basadas en el modelo geométrico y las interfaces físicas.
La condición Rigid Motion Suppresion está disponible para las siguientes interfaces físicas:
- Mecánica de sólidos (3D, 2D, 2D axisimétrico)
- Placa (3D)
- Plato (2D)
- Membrana (3D, 2D)
- Viga (3D, 2D)
- Celosía (3D, 2D)
- Dinámica multicuerpo (3D, 2D)
En este ejemplo un circuito de calentamiento se deforma debido a la expansión térmica. Al aplicar una condición Rigid Motion Suppression se asegura que el modelo tiene suficientes restricciones para una solución correcta. El gráfico muestra las tensiones de von Mises.
Nuevo modelo tutorial: Vibración y ruido en una caja de cambios
Este modelo tutorial ilustra el modelado de la vibración y el ruido en una caja de cambio de transmisión sincronizada de 5 velocidades dentro de un vehículo de transmisión manual. Un análisis de dinámica multicuerpo transitorio calcula las vibraciones de los engranajes para la velocidad del motor especificada y la carga externa. La aceleración normal a la carcasa de la caja de cambios es convertida al dominio de la frecuencia, que se incluirá como fuente de ruido. Se realiza entonces un análisis acústico para calcular los niveles de presión de sonido en los campos cercano, lejano y exterior.
Nota: Este modelo también requiere el módulo Acoustics.
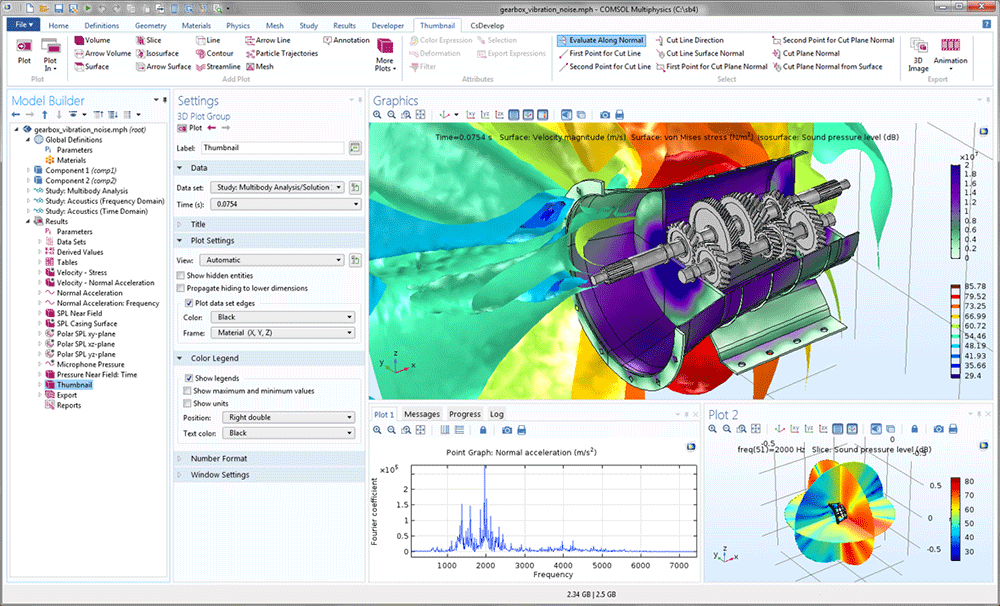
Las tensiones en la carcasa de la caja de cambios y el nivel de presión sonora en el aire circundante (arriba y abajo-derecha) de una caja de cambios de transmisión sincronizada de 5 velocidades dentro de un vehículo de transmisión manual. También se muestra el espectro de frecuencia de la aceleración normal en uno de los puntos de la caja de cambios (abajo-izquierda).
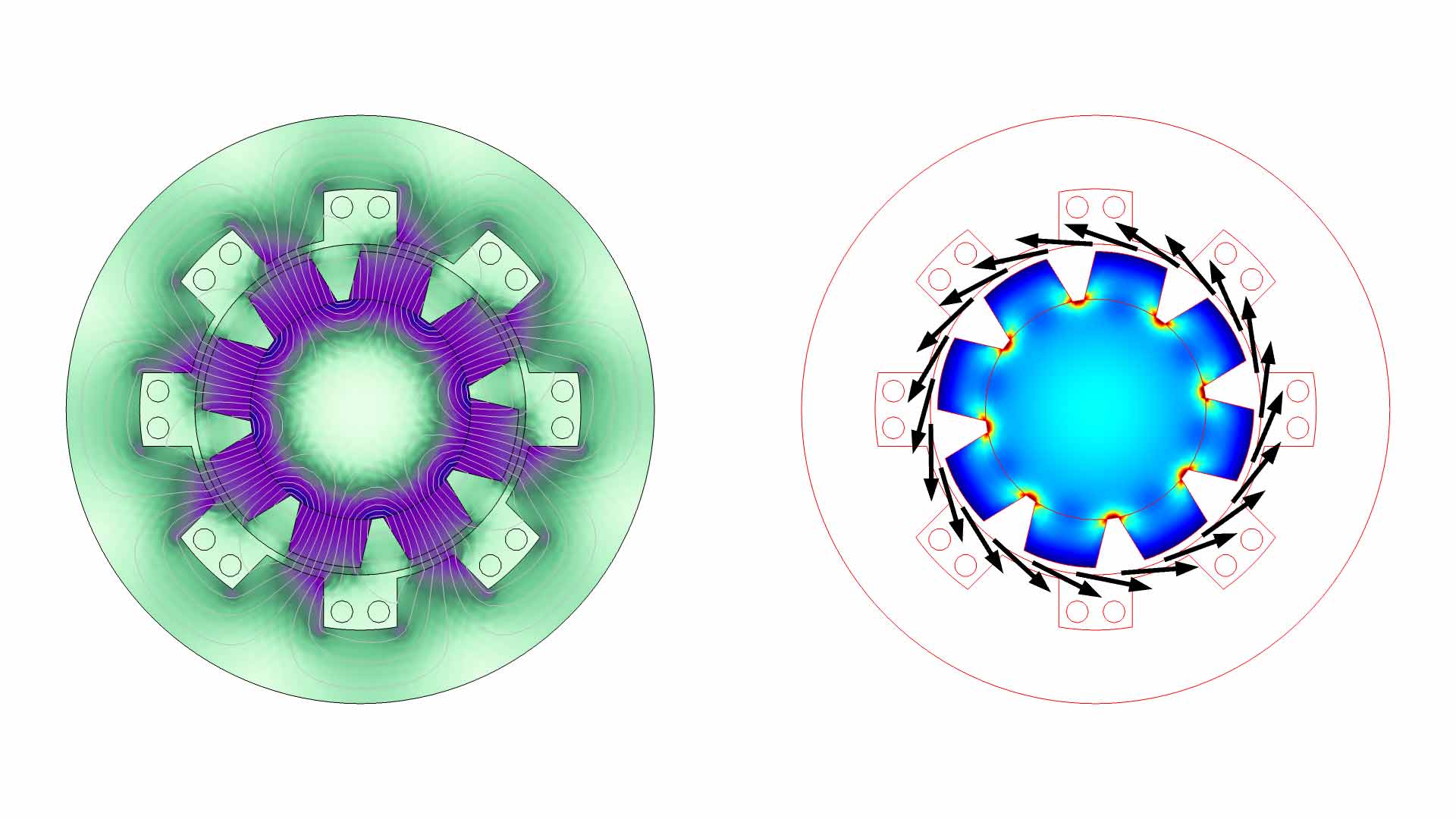
Nuevo modelo tutorial: Vibración en un motor de inducción
En el modelo tutorial de la Vibración de un motor de inducción, se producen corrientes inducidas en el rotor por corrientes armónicas en el tiempo en los bobinados del estátor y rotación del rotor. Las corrientes inducidas en el rotor interactúan con el campo magnético que se produce en las bobinas para generar el par de accionamiento del rotor. El aire del hueco entre el rotor y el estátor es asimétrico, dando como resultado vibraciones en el motor.
La simulación electromagnética se modela en 2D, mientras que la simulación de la dinámica multicuerpo se realiza en 3D. El par rotacional se calcula en función del tiempo. El par se utiliza entonces en el modelo de dinámica multicuerpo para calcular la velocidad del rotor, teniendo en cuenta los efectos inerciales. Debido a pérdidas resistivas y al par de carga en el eje, el rotor no rotará igual de rápido que el bobinado del estátor, así que se producirá un deslizamiento angular.
Nota: Este modelo también requiere los módulos AC/DC y Structural Mechanics.
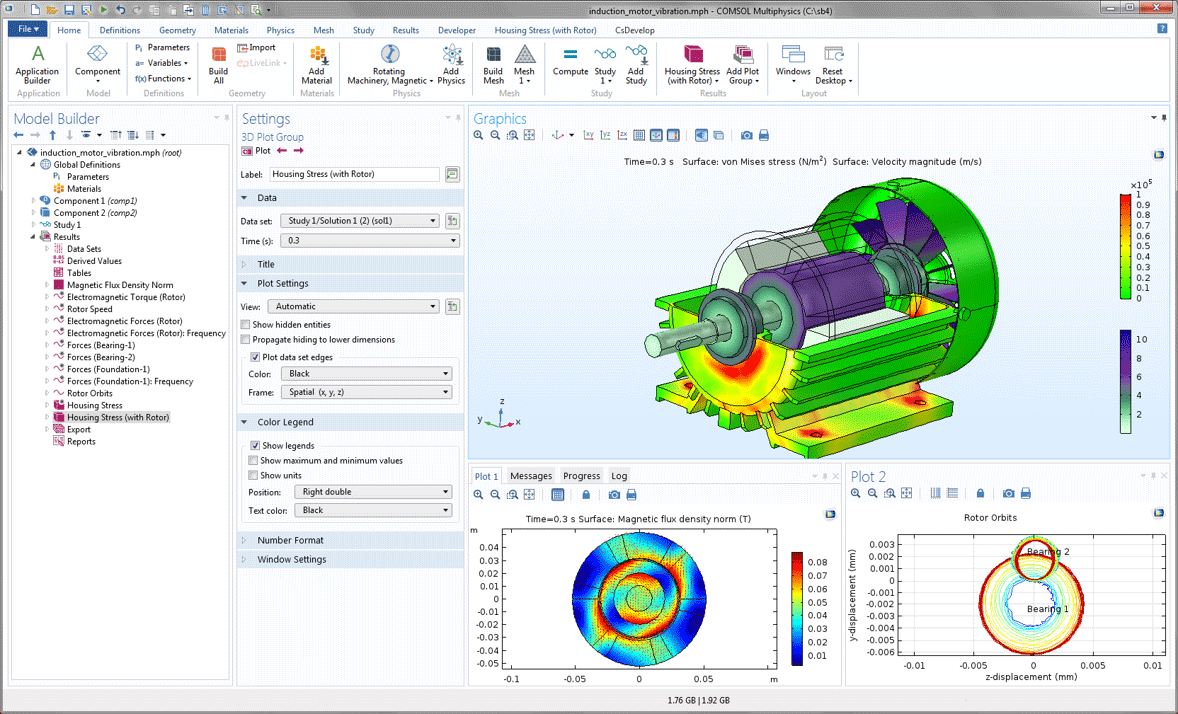
Gráfico de tensiones en la carcasa de un motor de inducción (arriba) y la densidad de flujo magnético en el rotor (abajo-izquierda). También se muestra la órbita del rotor en dos posiciones del cojinete (abajo-derecha).
Nuevo tutorial: Radiación de ruido por un tren de engranajes compuesto
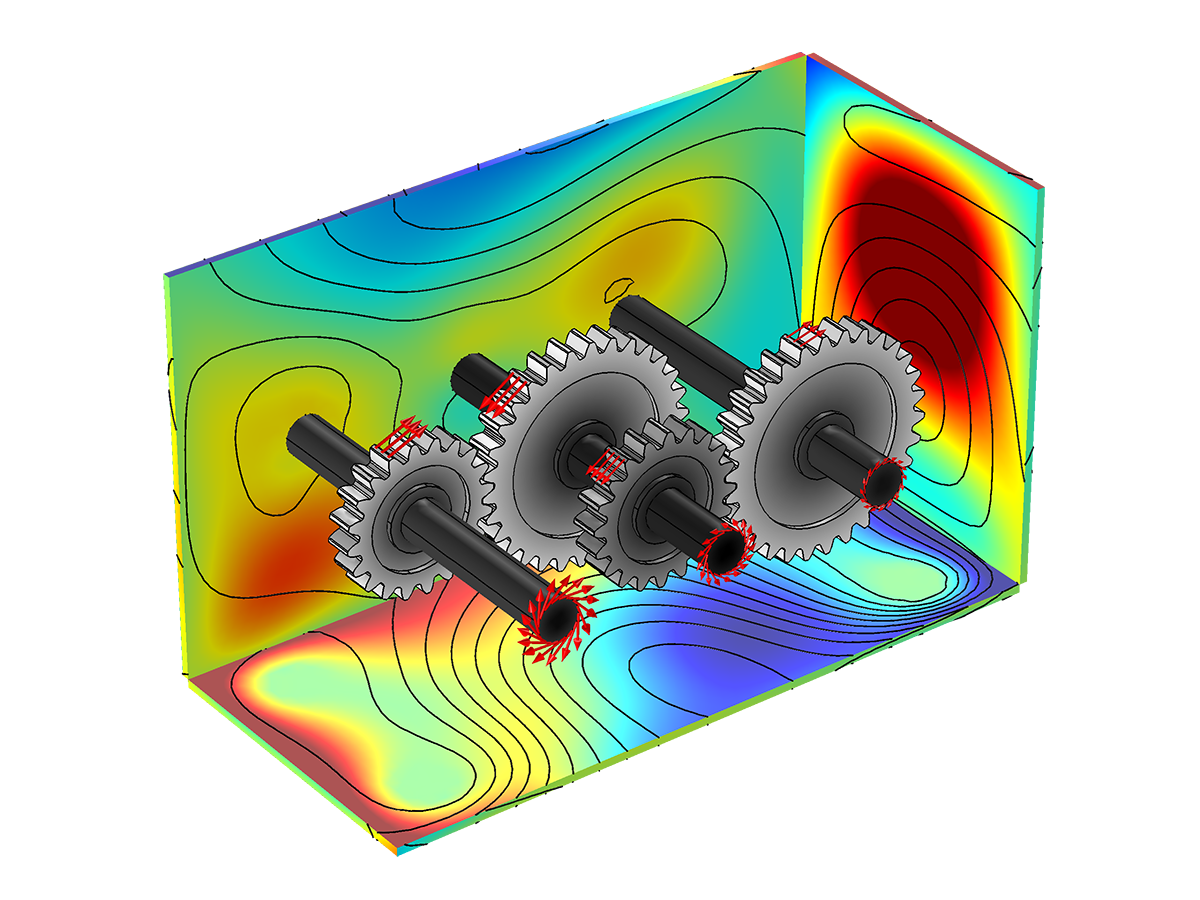
Predecir la radiación de ruido de un sistema dinámico proporciona a los diseñadores un conocimiento en profundidad del comportamiento de los mecanismos móviles al principio del proceso de diseño. Por ejemplo, considérese un caja de cambios en la que el cambio en la rigidez en la malla del engranaje causa vibraciones. Estas vibraciones se transmiten en el alojamiento de la caja de cambios a través de ejes y articulaciones. El alojamiento vibrante transmite a su vez energía al fluido circundante, dando como resultado la radiación de ondas acústicas.
Este modelo tutorial simula la radiación de ruido del alojamiento de una caja de cambios. Primero, se realiza un análisis de dinámica multicuerpo en el dominio del tiempo para calcular las vibraciones del alojamiento a la velocidad del eje motriz especificada. Entonces, se realiza un análisis acústico a la frecuencia seleccionada para calcular los niveles de presión sonora en los campos cercano, lejano y exterior, utilizando la aceleración normal al alojamiento como fuente de ruido.
Nota: Este modelo también requiere los módulos Multibody Dynamics y Acoustics.
5.2a
NOVEDADES
Los usuarios de Multibody Dynamics Module encontrarán en esta nueva versión de COMSOL Multiphysics® 5.2a la capacidad de modelar engranajes, lo que es útil para simulaciones de transmisión de potencia y automoción. Se ha añadido una serie de engranajes a la Librería de Piezas para facilitar la configuración del modelo, y muchos de los nuevos modelos tutoriales ilustran aplicaciones potenciales para esta funcionalidad dirigida por el usuario.
Modelado de engranajes
Se ha añadido funcionalidad para el modelado de engranajes en la interfaz de Dinámica de multicuerpos. Se puede modelar un sistema de engranajes utilizado para la transmisión de potencia. Existen nodos disponibles para varios tipos de engranajes y bastidores, incluyendo: Ruedas dentadas, engranaje helicoidal, rueda cónica, piñón sinfín, cremallera dentada, cremallera helicoidal. Un engranaje puede conectarse con otros engranajes añadiendo los siguientes nodos al árbol del modelo en el Model Builder: Par de engranajes, Engranaje de tornillo sinfín y Engranaje de piñón cremallera.
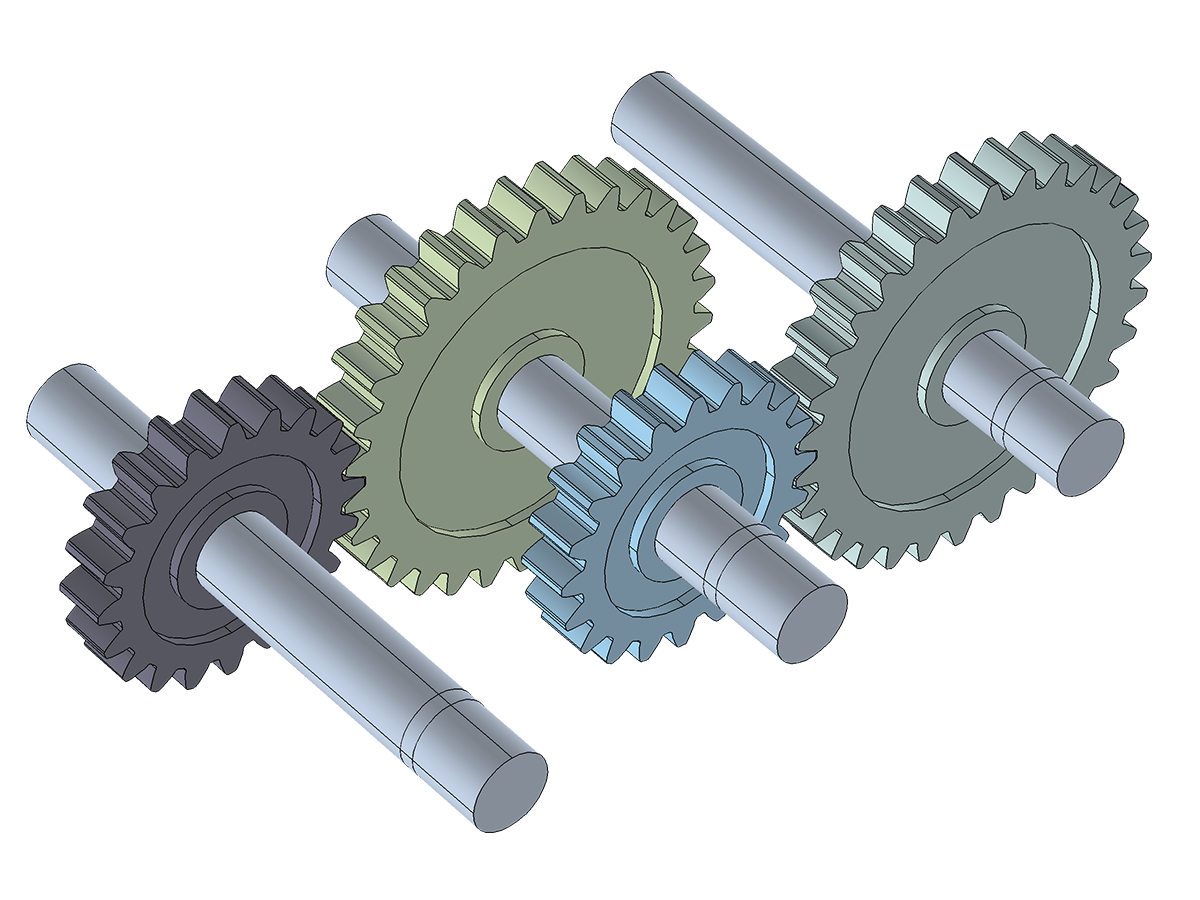
Un tren de engranaje compuestos, modelado utilizando la nueva funcionalidad de Gears en la interfaz Multibody Dynamics.
En el Model Builder, un engranaje se define como un cuerpo rígido. Sin embargo, también es posible especificar una rigidez finita para una red de engranajes cuando se conecta a otros engranajes. En el Model Builder, se puede añadir un nodo de Elasticidad del engranaje como un subnodo de un nodo Par de engranajes para definir las propiedades elásticas de la red de engranajes, tales como la rigidez de la red, amortiguación de red y relación de contacto.
Un par de engranajes pueden ser considerados como un par ideal sin error de transmisión estática o backlash. Cuando existe un error de transmisión estática, que podría ser debida a errores geométricos y modificaciones geométricas, un subnodo de Error de transmisión puede añadirse al nodo Par de engranajes. Este tipo de ejemplos incluye un engranaje de rodadura, desalineación, o la ocurrencia de socavaciones de la cabeza o el pie. De forma similar, en el caso donde existe un retroceso que afecta a la dinámica del sistema, se puede añadir un subnodo Backlash al nodo de Par de engranajes.
Más aún, se puede añadir un subnodo de Fricción al nodo de Par de engranajes para tener en cuenta las fuerzas de fricción en el punto de contacto. Las fuerzas de fricción son dominantes únicamente cuando existe un deslizamiento significativo en el punto de contacto. El deslizamiento podría deberse a el cambio de la distancia del centro o si los ejes de ambos engranajes no son ni paralelos ni intersectan. Los pares de engranaje sinfín es un ejemplo de este tipo de operación, donde un deslizamiento inherente es presente incluso bajo condicoines perfectas.
Engranajes en la Librerías de Piezas
Se han añadido una serie de geometrías de engranajes parametrizados a la Librería de piezas. Pueden crearse diferentes tipos de engranajes utilizando estas piezas tanto para modelos 2D como 3D. Los parámetros de entrada de las piezas pueden modificarse para personalizar el dentado del engranaje y la forma del primordio del engranaje. Estas piezas pueden utilizarse para construir un dentado de engranaje, un engranaje simple, un par de engranajes o un tren de engranajes paralelos o planetarios.
Las piezas engranajes disponibles se han dividido en tres categorías:
- Engranajes externos
- Rueda dentada
- Engranaje helicoidal
- Engranaje cónico
- Piñón sinfín
- Engranajes internos
- Rueda dentada
- Engranaje helicoidal
- Ruedas dentadas
- Cremallera dentada
- Cremallera helicoidal
Existen piezas separadas adicionales para crear la sección transversal dentada para todos los tipos de engranajes.
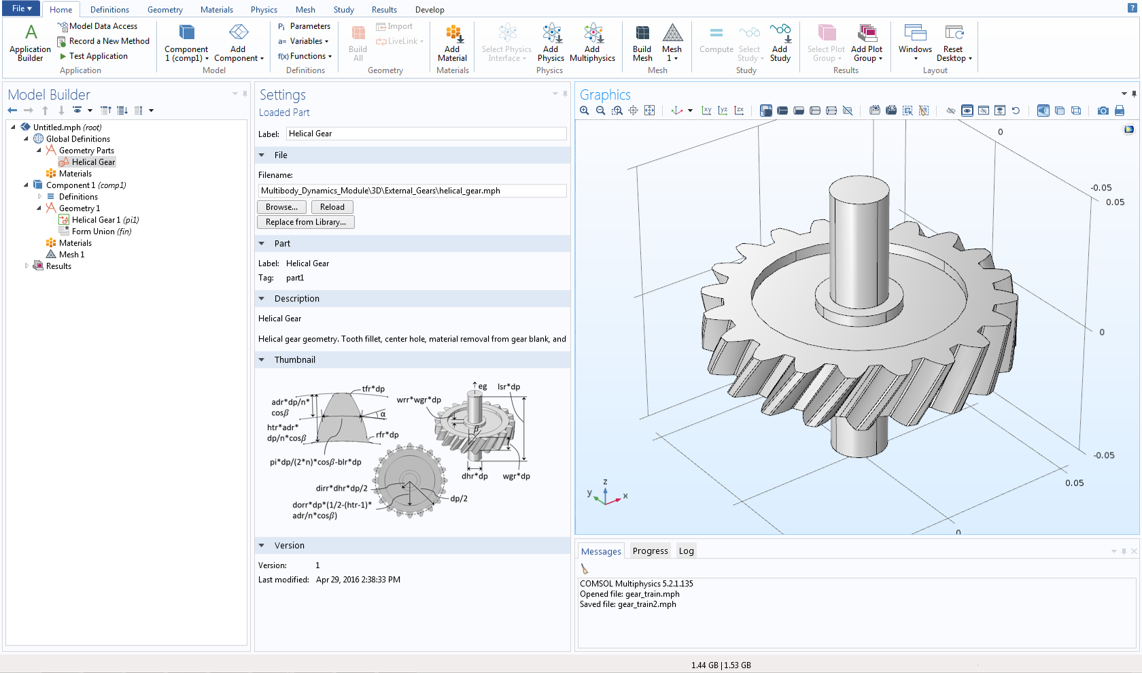
Geometría de un engranaje helicoidal, creada utilizando las piezas de engranaje disponibles en la Librería de piezas de Multibody Dynamics Module.
Nuevo modelo tutorial: Mecanismo engranaje diferencial
Este modelo simula el mecanismo de un engranaje diferencial utilizado en los automóviles y otros vehículos con ruedas. Un diferencial permite que la rueda motriz externa ruede más rápida que la rueda motriz interna durante una vuelta. Esto es necesario cuando un vehículo gira para permitir que la rueda que está viajando por la parte exterior de la curva de giro ruede más rápida y cubra una mayor distancia que la rueda que va por el interior de la curva. La media de la velocidad rotacional de las dos ruedas motrices es simplemente la velocidad rotacional de entrada del eje de transmisión. Un incremento en la velocidad de una de las ruedas se balancea con un decrecimiento en la velocidad de la otra.
Se realiza un análisis transitorio para calcular el movimiento de los engranajes de araña en casos donde un vehículo se mueve en un camino recto o curvado. La amplitud de la velocidad de los diferentes componentes y la velocidad angular de las ruedas interna y externa se calculan para ambos casos.
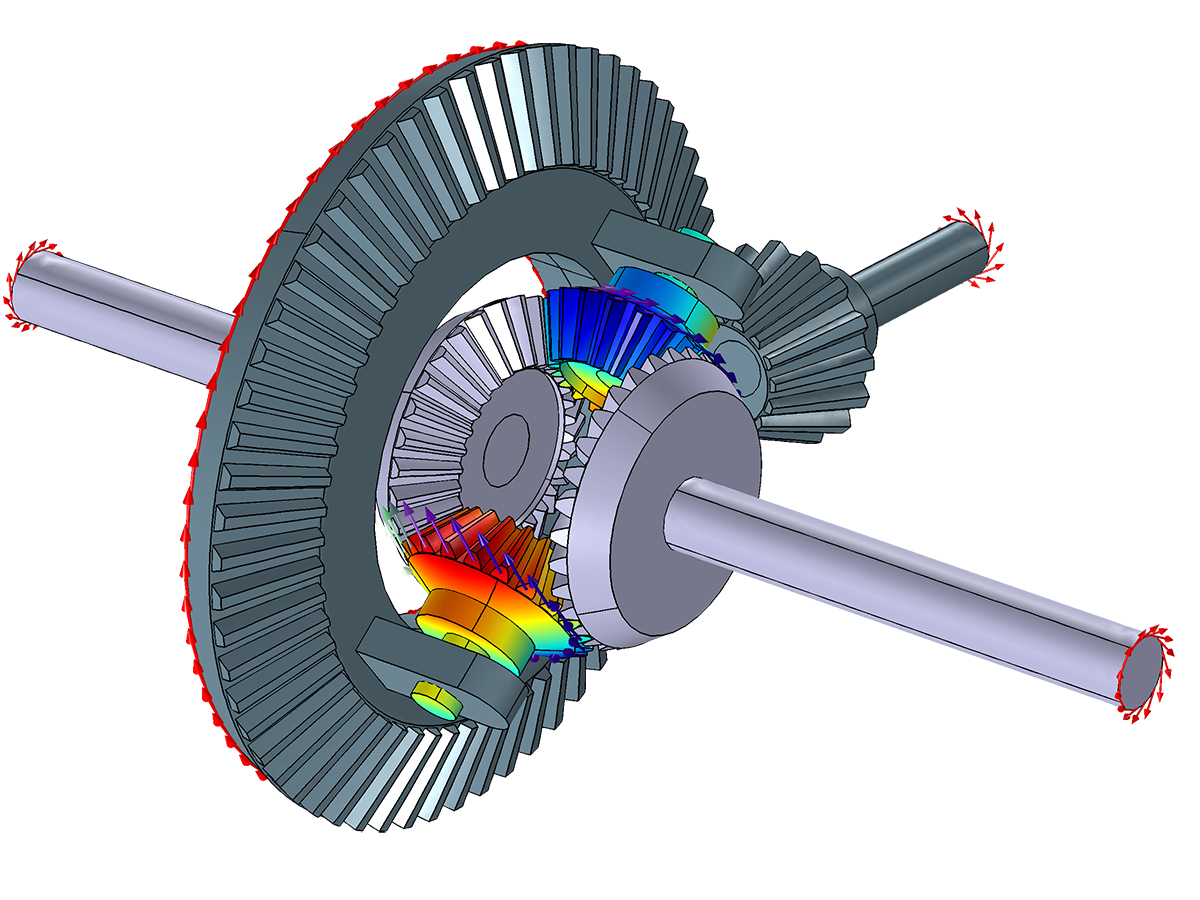
Un mecanismo de engranaje diferencial, permite que los dos ejes del vehículo roten a diferentes velocidades. Se muestra la amplitud de la velocidad y la dirección de las rotaciones.
Nuevo modelo tutorial: Vibraciones en un tren de engranajes compuesto
Este modelo simula las vibraciones en un tren de engranajes compuesto. Los engranajes dentados, utilizado para modelar el tren de engranajes, se montan en árboles rígidos y donde los árboles están soportados por carcasas elásticas en ambos finales. La red del engranaje se considera que es elástica con rigidez variable, lo que es la fuente de vibración sostenida. Se realiza un análisis transitorio para calcular la dinámica de los engranajes así como las vibraciones de la carcasa.
El modelado de contacto es utilizado para el cálculo de la rigidez de la red del engranaje. Se realiza un análisis paramétrico para calcular la rigidez de la red del engranaje como función de la rotación del engranaje en un ciclo de la red.
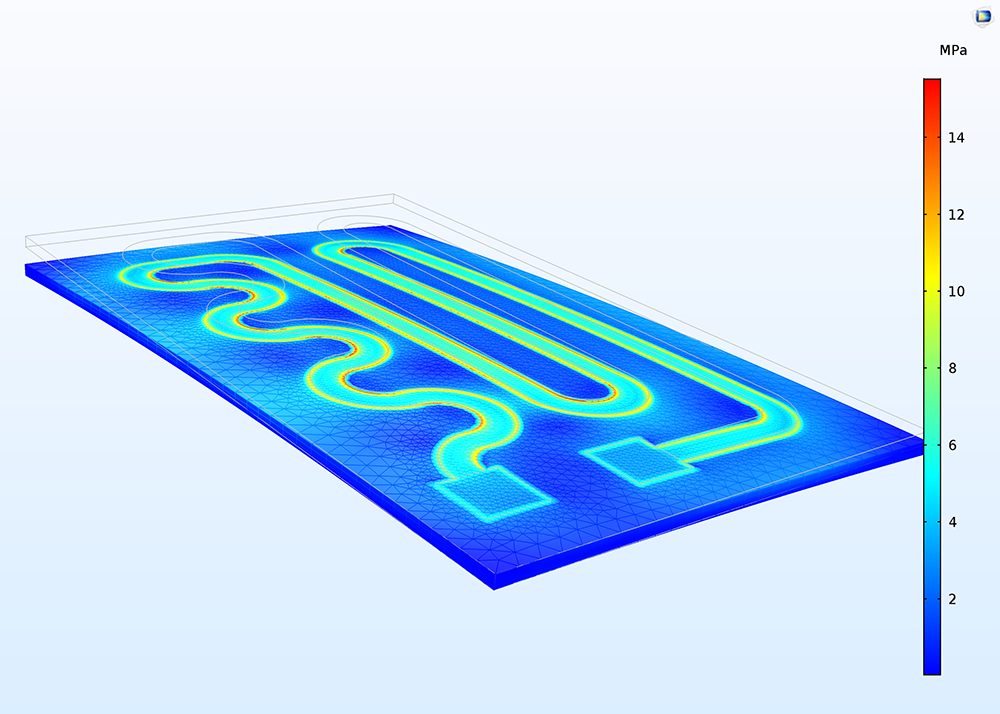
El modelo calcula la distribución de tensiones de von Mises en el par de engranajes, donde las tensiones son altas en los puntos de contacto, así como en las raíces de los dientes. También se calculan la rigidez de la red de engranajes, el desplazamiento en los engranajes, y la aceleración normal en la carcasa debida a la vibración.
La aceleración normal en la carcasa debida a las vibraciones inducidas por la red de engranajes elástica. También se muestra un gráfico en escala de grises del desplazamiento de los engranajes.
Nuevo modelo tutorial: Dinámica de engranajes helicoidales
Este modelo tutorial ilustra la dinámica de engranajes helicoidales. Considera el caso donde la red de engranajes se considera que es rígida o elástica. Se realiza un estudio transitorio para analizar el efecto de la rigidez de la red de engranajes constante, la rigidez de la red de engranajes variable, el error de transmisión de la fuerza de contacto, y la velocidad angular de los engranajes. Se realiza un análisis de frecuencias propias para calcular las frecuencias naturales y formas de los modos del par de engranajes para redes de engranajes rígidos y elásticos.
Nuevo modelo tutorial: Fuerzas y momentos en engranajes cónicos
Este modelo tutorial simula un par de engranajes cónicos rectos. Los engranajes se modelan como rígidos, pero uno de ellos esta fijo mientras que el otro está articulado en una barra rígida. La barra rígida también está articulada en un punto que cae en el eje del engranaje fijo. Se realiza un análisis transitorio para calcular las fuerzas y momentos en el centro del engranaje fijo. Los resultados del análisis se comparan con resultados de una referencia de una publicación internacional.
El movimiento de un engranaje cónico cuando se prescribe una rotación incremental en una barra rígida.
5.2
Nueva App: Simulador de un regulador centrífugo
Los reguladores centrífugos, un tipo específico de regulador, controlan la velocidad de un motor regulando la cantidad de admisión de combustible. Para mantener una velocidad cercana a constante, independientemente de las condiciones de carga o suministro de combustible, los reguladores centrífugos utilizan el principio del control proporcional. Mientras el regulador está en funcionamiento es crítico que rápidamente alcance una nueva configuración de estado de equilibrio. Por lo tanto, el diseño del muelle y amortiguador es importante.
En la app Centrifugal Governor Simulator se puede realizar un análisis de cuerpos rígidos de un regulador centrífugo con resorte para encontrar el movimiento de la manga, la posición de equilibrio de la manga y la frecuencia natural del sistema. Se puede realizar mediante un análisis transitorio para calcular el movimiento de la manga y la trayectoria de las bolas, un análisis estacionario para calcular la configuración de equilibrio del regulador, o un análisis de frecuencias propias para calcular la forma del modo del regulador y sus características de amortiguamiento.
Muchos de los parámetros geométricos pueden ser cambiados, así como la constante del resorte y el coeficiente de amortiguación, y la densidad de las bolas y sus enlaces.
.
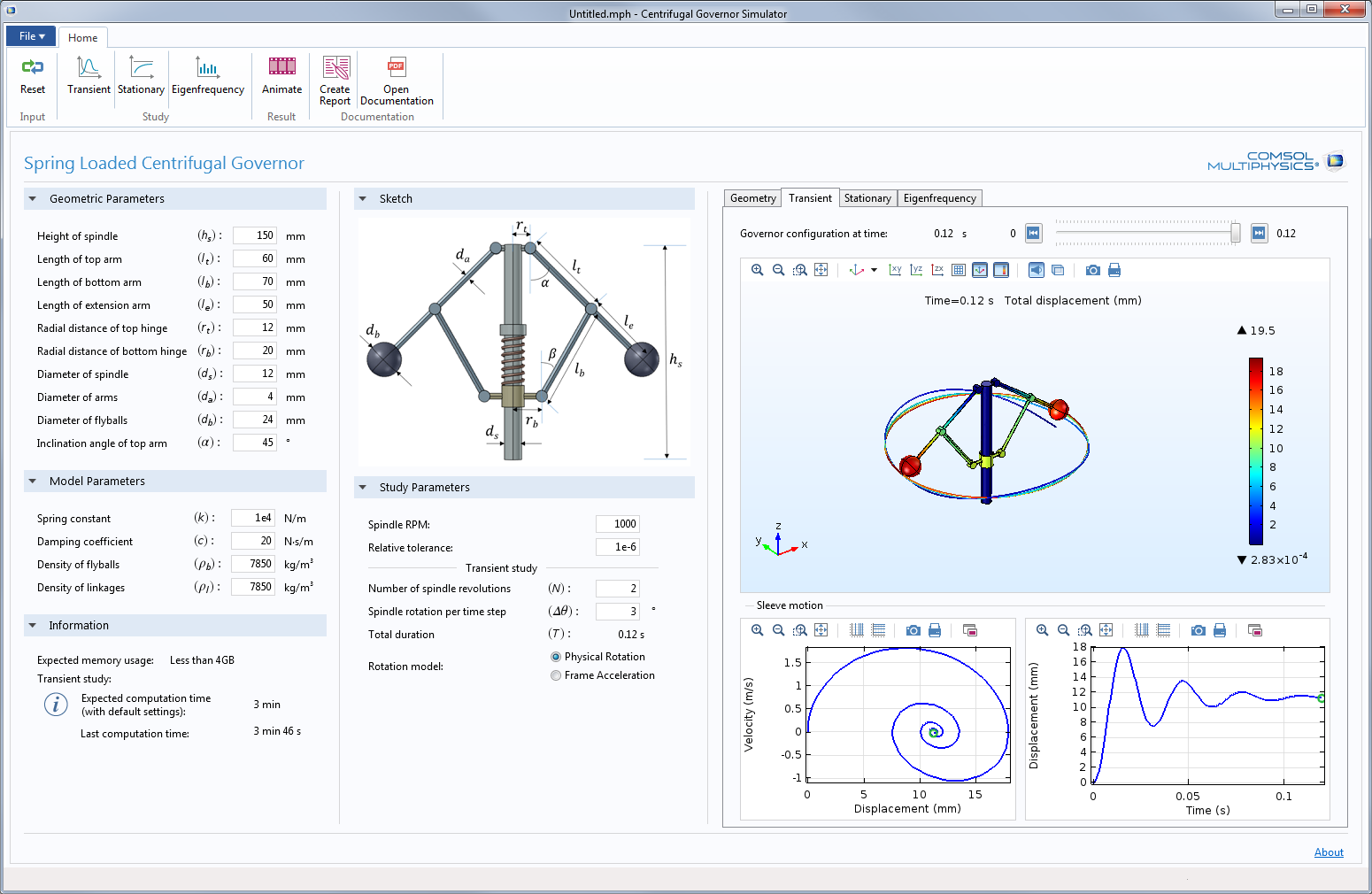
Interfaz de usuario de la app Centrifugal Governor Simulator que muestra los resultados de una simulación transitoria de un regulador centrífugo que alcanza el estado de equilibrio.
5.1
NOVEDADES
Nueva app: analizador de camión-grúa
Una nueva aplicación se ha añadido para calcular la capacidad de carga de un camión-grúa para posiciones dadas de la grúa y capacidades de los cilindros hidráulicos.

Una app de una grúa montada en un camión para analizar la capacidad de carga en una posición de la grúa y capacidades del cilindro hidráulico dadas.
Fuerza/momento aplicado en grado de libertad de una articulación
Ahora es posible aplicar una carga directamente en el grado de libertad de una articulación. Como ejemplo, cuando se utiliza una articulación prismática para modelar un cilindro hidráulico, la fuerza del cilindro puede ser prescrita. El cambio aparece en el subnodo de fuerza y momento aplicados de una articulación, donde ahora es posible también seleccionar Articulación en la sección donde aplicar.
Filtro de adjuntos en articulaciones
En un modelo de dinámica multicuerpo grande la lista de selección para Fuentes y Destinos en la sección de selección de adjuntos para una articulación puede hacerse muy grande. Ahora es posible filtrar estas listas utilizando una selección de objetos. Cuando se selecciona la nueva casilla Use selection filter, aparecerán dos nuevos subnodos (Source Filter y Destination Filter) bajo el nodo de la articulación. Entonces es posible seleccionar dominios de forma que únicamente los adjuntos o dominios rígidos presentes en los dominios seleccionados aparezcan en la lista Source and Destination en la sección Attachment selection.
Condición Rodillo en la interfaz de dinámica multicuerpo
Ahora es posible utilizar una condición de contorno Rodillo en la interfaz física de dinámica multicuerpo. Esta condición puede ser utilizada para modelar un conjunto de contornos deslizantes o una condición de simetría.
Gráfico de trayectoria de un punto en los modelos de dinámica multicuerpo
| Ahora es posible realizar un gráfico de la trayectoria de puntos geométricos o puntos de corte de un cuerpo móvil utilizando la opción Point Trajectories en los subnodos 3D Plot Group y 2D Plot Group. Este nuevo gráfico se utiliza en varios de los ejemplos de la librería de aplicaciones del módulo Multibody Dynamics. |  Ejemplo de la funcionalidad de gráfico de trayectoria del punto en un modelo de un regulador centrífugo. |
Cálculo de propiedades de masa
Las interfaces físicas de mecánica de estructura (mecánica de sólidos, membrana, cáscara, placa, armadura, viga y dinámica multicuerpo) ahora pueden devolver propiedades completas de masa al nodo de propiedades de masa bajo definiciones. Todos los tipos de contribuciones de masa de las interfaces físicas son tenidas en cuenta:
- Densidad de masa en todos los modelos de materiales
- Masa añadida
- Masa puntual e inercia
- Masa e inercia en dominios rígidos y conectores rígidos
- Inercia respecto al grosor en vigas y cáscaras
- Inercia respecto a la rotación alrededor del eje de una viga
También es posible calcular las propiedades de masa en la configuración deformada seleccionando Spatial frame en los ajustes para el subnodo Mass Properties.
5.0
Muelle-amortiguador discretoSe ha introducido una nueva funcionalidad de Muelle-Amortiguador que puede conectar dos puntos con un muelle elástico, amortiguador viscoso, o ambos. Los dos puntos pueden pertenecer a un dominio rígido o a un accesorio. Uno de los puntos también puede fijarse a tierra. La fuerza actúa en la dirección dada por las posiciones actuales de los dos puntos. Elasticidad de articulacionesLos grados de libertad restringidos en una articulación ahora pueden hacerse elásticos. Esto puede servir para muchos propósitos:
Movimiento baseLa nueva funcionalidad de Movimiento Base permite que el lado de la fuente de una articulación tenga un desplazamiento, velocidad o aceleración prescritos. El movimiento base se prescribe en una funcionalidad global separada, que puede ser referenciada por articulaciones individuales. Conexión de cáscaras y vigasAhora es posible conectar piezas modeladas con las interfaces de Cáscara y de Viga utilizando una articulación, muelle o amortiguador en la interfaz de Dinámica Multicuerpo. Resumen de grados de libertad de cuerpo rígidoEn los ajustes para la interfaz de Dinámica Multicuerpo, ahora hay una nueva sección que proporciona el número de grados de libertad y restricciones introducidas por cuerpos rígidos y articulaciones. Esta información es muy útil cuando se desea determinar si una estructura está completamente restringida o sobrerestringida. Inicialización de transitorioUn nuevo conjunto de herramientas está disponible para controlar la inicialización del transitorio |
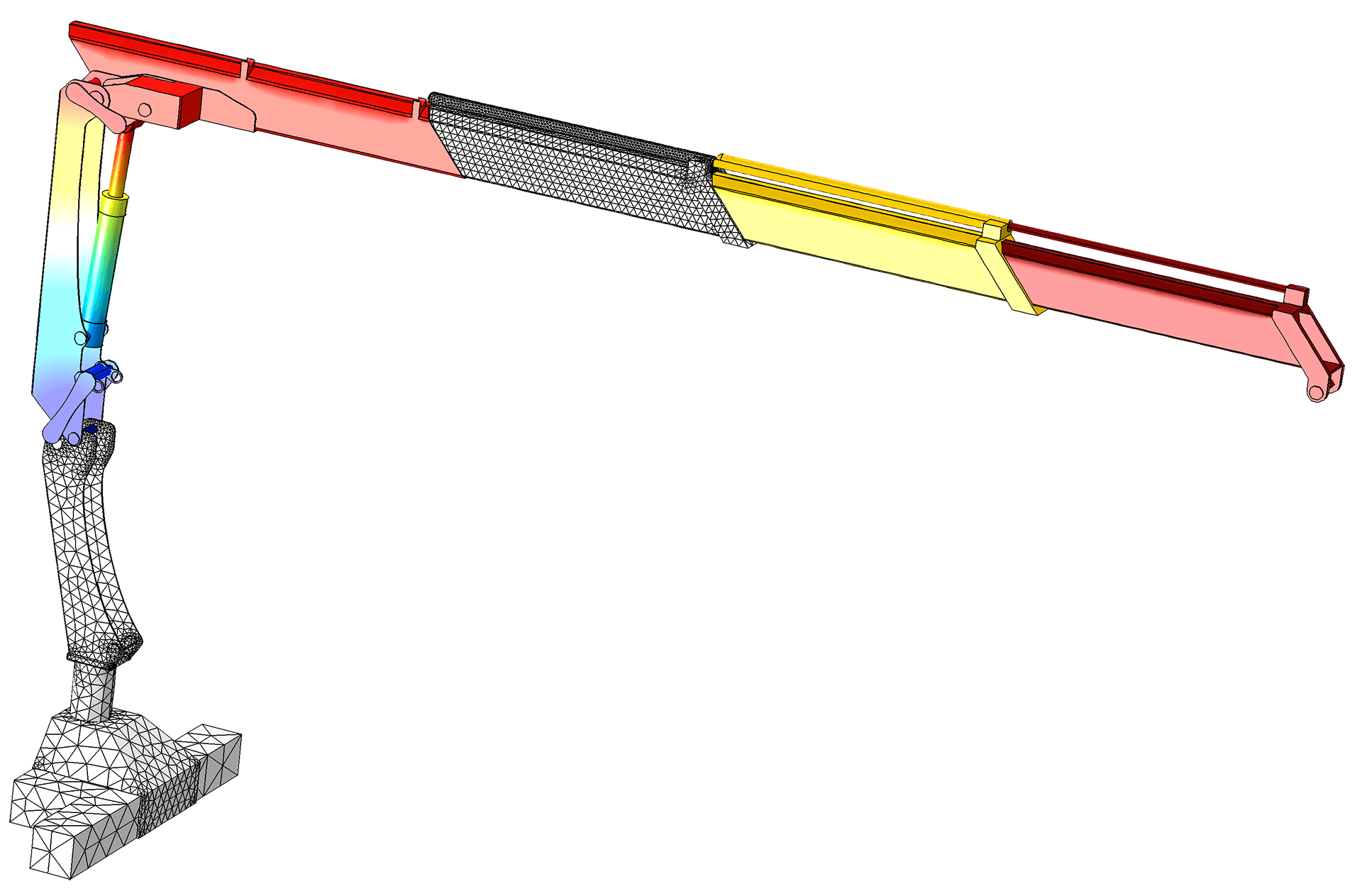 Grúas sobre camión: Este es un modelo de una grúa que consta de 14 cuerpos rígidos y 17 articulaciones diferentes. Se simula un ciclo de carga y se estudian las fuerzas en los cilindros y ejes. 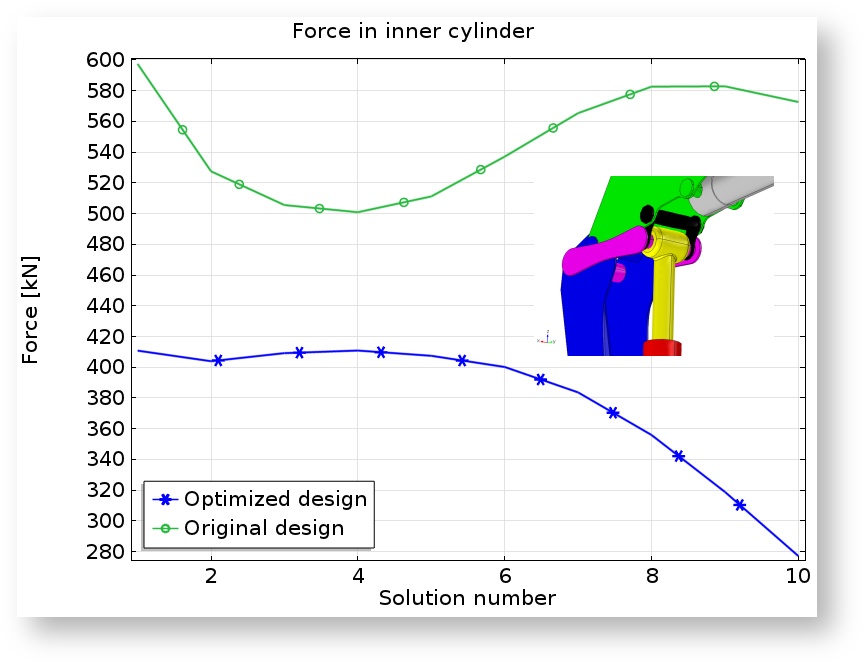 Optimización de un mecanismo de enlace de grúa:Se ha optimizado la geometría de la relación interna del modelo de grúa sobre camión. Se permite a tres ejes moverse de forma independiente de modo que la fuerza del cilindro necesario para llevar la carga se reduce al mínimo a través de un conjunto de posiciones de la grúa. |