Caso de estudio de usuario: MapleSim utilizado para desarrollar rápidamente un modelo multi-dominio de alta fidelidad de un rover espacial robótico
- Detalles
- Categoría: MapleSim
- Visto: 8700
La exploración planetaria no tripulada es hoy el foco de muchas agencias espaciales de investigación alrededor del mundo. Para realizarla con éxito se necesitan rovers robóticos autónomos avanzados. El Dr. Amir Khajepour, de la cátedra de investigación canadiense de sistemas de vehículos mecatrónicos y profesor de ingeniería en el departamento de ingeniería de mecánica y mecatrónica en la universidad de Waterloo (UW), está trabajando con la agencia espacial canadiense (CSA), Maplesoft, y el gobierno de Canadá, para desarrollar una solución completa al sistema de administración de energía de los rovers autónomos. El Dr. Khajepour es una figura principal de la mecatrónica y la robótica y ha elegido MapleSim, una avanzada herramienta de modelado físico de Maplesoft, como la herramienta clave para su proyecto.
La CSA tiene un gran historial en la aplicación de técnicas simbólicas en el modelado de robots espaciales. Han usado estas técnicas en el diseño de varios robots espaciales desplegados en el programa Space Shuttle y en la estación espacial internacional. En esta nueva iniciativa de la UW están utilizando MapleSim, la última generación de tecnología en modelado simbólico, para desarrollar rápidamente modelos de subsistemas multidominio de alta fidelidad de los rovers.
La meta general de este proyecto es diseñar un sistema rover que permita al rover ir del punto A al punto B, teniendo en consideración todas las restricciones posibles. Por ejemplo, ¿cuál sería el camino a realizar si el rover tiene que llegar a una localización especifica con el menor riesgo? Alternativamente, si el rover tiene que llegar a una localización específica usando el mínimo de energía, ¿cuál sería el camino a seguir?
La primera fase de este proyecto de tres años es desarrollar el modelo inicial del rover, incluyendo los aspectos como la batería, la generación de energía solar, el terreno y las condiciones del suelo. El proyecto, en sus últimas etapas, también incluirá una batería completa de fases de prueba hardware-in-the-loop (HIL) utilizando hardware y software en tiempo real de National Instruments, usando modelos de sistema que se hayan desarrollado con, y se distribuyan automáticamente desde MapleSim. Esto es crítico para optimizar los parámetros del sistema que maximizarán la conservación de energía mientras se cumplen los objetivos de la misión.
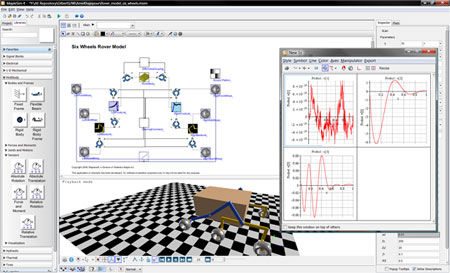
“Con el uso de MapleSim, el modelo base del rover fue desarrollado en un mes,” dice el Dr. Khajepour. “Los beneficios de MapleSim en comparación con las herramientas tradicionales son significativos. Ahora podemos tener el modelo matemático de un rover de 6 ruedas sin escribir una sola ecuación. MapleSim fue capaz de generar una lista óptima de ecuaciones para el sistema del rover automáticamente lo que es esencial para la fase de optimización.”
El Dr. Khajepour quedó también sorprendido con la interfaz gráfica de MapleSim. Dentro de MapleSim, simplemente puedes recrear el diagrama del sistema en tu pantalla usando componentes que representen el modelo físico. El diagrama del sistema resultante se parece mucho a lo que un ingeniero dibujaría a mano. MapleSim puede transformar fácilmente los modelos en animaciones realistas. Estas animaciones hacen más fácil poder validar los diagramas de sistema y dan una visión más profunda del comportamiento del sistema.
“La habilidad de poder ver el modelo, de ver las partes móviles, es muy importante para un desarrollador de modelos,“ dice el Dr. Khajepour. “Ahora estoy pasando a utilizar MapleSim en la gran mayoría de mis proyectos.”