Uso del PID en las simulaciones de COMSOL
- Detalles
- Categoría: Comsol
- Visto: 8647
El controlador PID es una extensión del controlador on-off y se considera suficiente para la mayoría de problemas de control, hasta el punto que más del 95% de los lazos de control utilizan el PID. Tal es la utilidad de este tipo de controlador que ha sido capaz de superar a cambios tecnológicos tan importantes como la aparición del microprocesador, la autosintonía o la planificación de la ganancia y es utilizado ampliamente en el control de procesos industriales.
Entre sus funciones más importantes podemos destacar que utiliza la realimentación para rechazar las perturbaciones, elimina el error estacionario con la acción integral y puede anticipar el futuro gracias a la acción derivativa.
Pese a su popularidad su ajuste para conseguir los mayores beneficios sobre el proceso no es trivial. Para ello consta de tres parámetros de control combinando las tres acciones: Proporciona (P), Integral (I) y Derivativa (D).
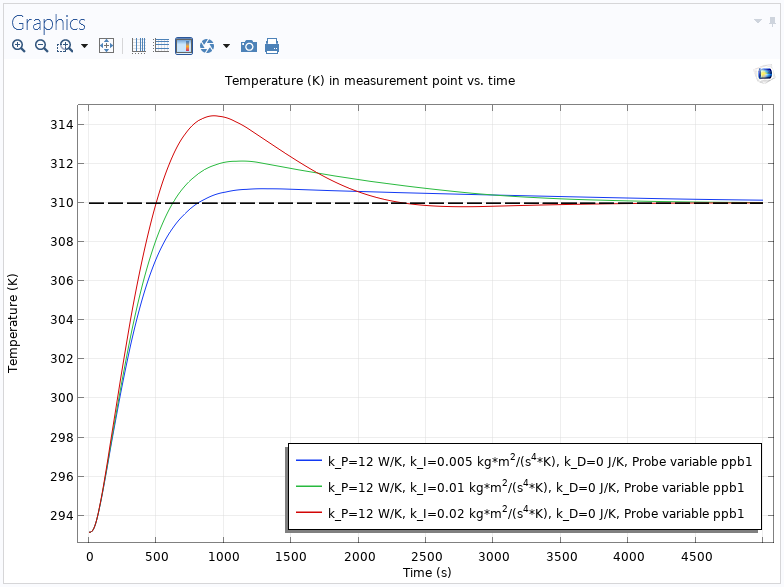
Desde la versión 5.5 de COMSOL Multiphysics es posible incluir fácilmente un controlador PID en las simulaciones a través del complemento Controlador PID. Este complemento implementa un controlador PID con funcionalidad adicional, como anti-erolle del integrador ("integral anti-windup") y filtrado de la parte derivativa.
Magnus Ringh nos describe cómo utilizar el controlador PID en COMSOL Multiphysics y muestra su funcionamiento con dos ejemplos de simulación en la entrada del blog de COMSOL titulada "How to Simulate Control Systems Using the PID Controller Add-In".