Librería de poleas y cuerdas de MapleSim
- Detalles
- Categoría: MapleSim
- Visto: 6819
Reduzca el riesgo de problemas de diseño con simulaciones precisas y dinámicas de sistemas de poleas y cabrestantes con MapleSim y su librería MapleSim Ropes and Pulleys Library.
|
|
Descripción general
La biblioteca de cuerdas y poleas de MapleSim permite crear fácilmente sistemas de poleas y cabrestantes como parte del desarrollo de la máquina. Al usar esta biblioteca complementaria para MapleSim, se puede modelar la dinámica de los sistemas de cuerdas y poleas, y ver visualizaciones tridimensionales mejoradas del rendimiento del sistema. Al utilizar la biblioteca de cuerdas y poleas se añade fidelidad a los modelos de máquinas con cuerdas, cadenas, cables, poleas y más.
Destacados
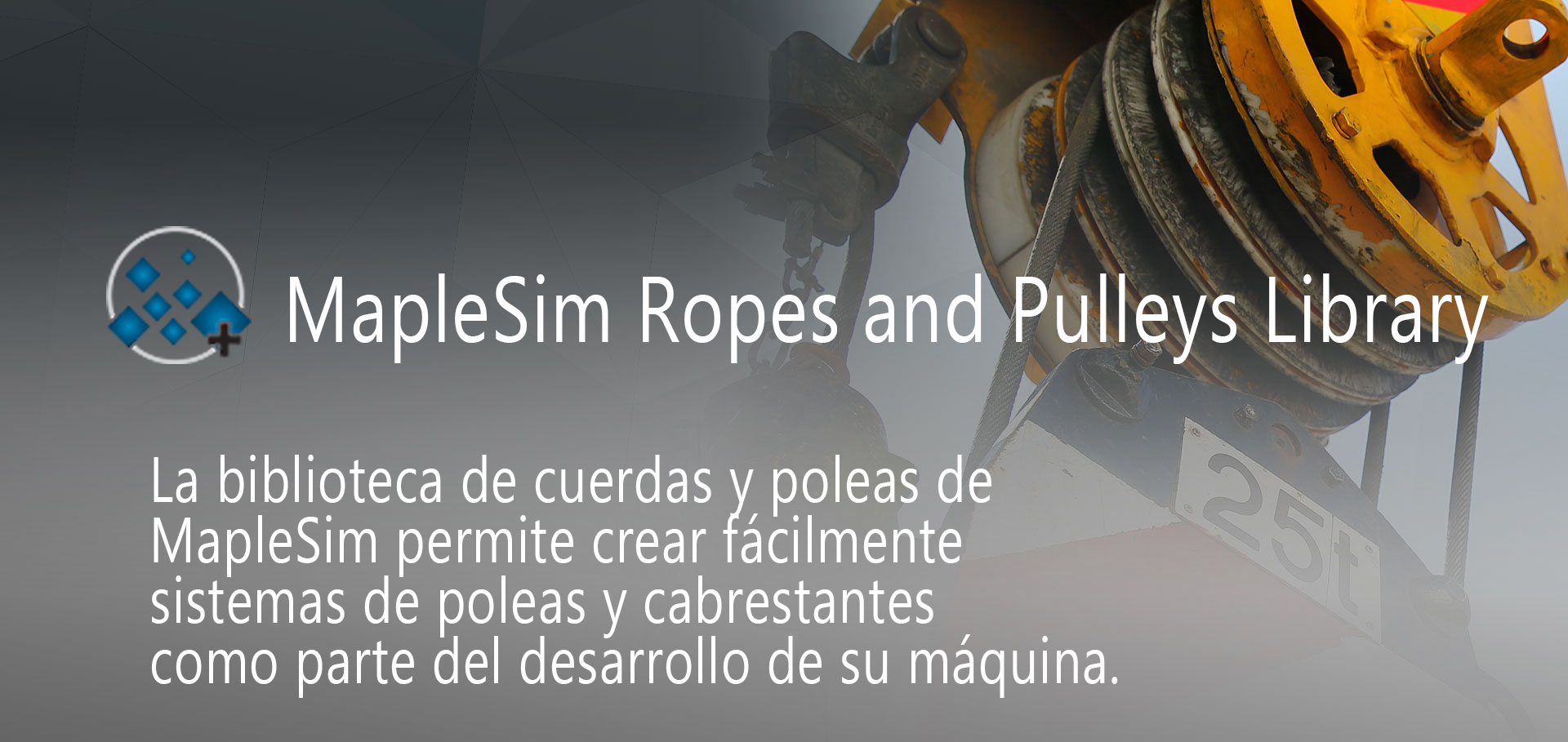
- Crear sistemas de poleas en 2D y 3D utilizando componentes como poleas fijas y flotantes, cabrestantes, cuerdas, cadenas y cables.
- Incorporar comportamientos realistas de cuerdas y sistemas de poleas, incluido el deslizamiento de las poleas, las masas de las cadenas, la flexión de los cables y la carga del viento.
- Explorar sistemas con visualizaciones en 3D que muestran el flujo de materiales y la tensión del sistema mediante flechas de fuerza y mapas de colores.
La biblioteca de cuerdas y poleas de MapleSim contiene una variedad de componentes que se pueden personalizar para adaptarse a un modelo específico. Las características incluyen:
- Cuerda: rigidez axial, densidad lineal, amortiguación lineal, tensión previa, cálculo automático de longitud, visualizaciones de tensiones de materiales y más
- Cable: rigidez axial, densidad lineal, amortiguación espacial lineal, distribución de masa tridimensional discretizada, fuerzas del viento y más
- Cadena: rigidez axial, densidad lineal, rigidez de flexión, distribución de masa 3D discretizada y más
- Polea: masa e inercia, deslizamiento, motorización y visualización 3D
- Cabrestante: Motorización, visualización 3-D y visualización de variación de tensión
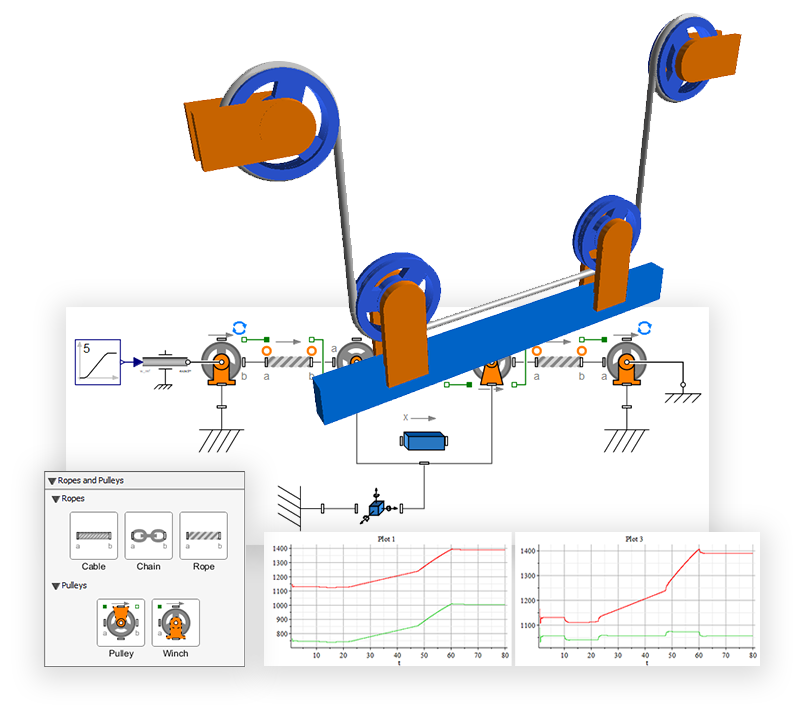
Área de aplicación: Robots accionados por cable
Los robots accionados por cable suelen ser la mejor opción cuando se diseñan máquinas para una gran maniobrabilidad o para gestionar cargas muy pesadas. Sin embargo, al igual que cualquier máquina industrial, estos diseños deben optimizarse tanto para el rendimiento como para la seguridad. Mediante el uso de MapleSim Ropes and Pulleys Library, los ingenieros pueden obtener datos de simulación de alta fidelidad de sus sistemas de robot accionados por cable, lo que reduce el tiempo y el costo necesarios para la creación de prototipos físicos. Las simulaciones se completan en minutos, no en horas o días, y permiten a los ingenieros probar rápidamente varios diseños en cuanto a seguridad, rendimiento y más.
La biblioteca de cuerdas y poleas permite modelar y simular robots accionados por cable que participan en:
- Logística: maximizar los tiempos de ciclo de la máquina probando el código de PLC con un modelo virtual
- Proyectos de ingeniería civil: validar rápidamente el comportamiento de la máquina mucho antes de la creación de prototipos físicos
- Sistemas de servicio pesado: validar el rendimiento y encontrar problemas de diseño más rápido
- Construcción: validar los límites de seguridad para el rendimiento de la máquina sin correr el riesgo de dañar la máquina
- Condiciones peligrosas del sitio: reducir la posibilidad de fallas de la máquina en el sitio probando las condiciones del sitio virtualmente