MapleSim es utilizado para modelar el movimiento de un sistema óptico complejo
- Detalles
- Categoría: MapleSim
- Visto: 6464

En un sistema óptico, las simulaciones de trazado de rayos son, a menudo, realizadas para una situación ideal de alineamiento perfecto de los componentes ópticos. Sin embargo, en las situaciones prácticas, usualmente es necesario mover componentes ópticos debido a varias razones. Las monturas que albergan a estos componentes pueden ser complicadas y modelar su movimiento es importante para comprender sus efectos sobre el rendimiento del sistema. En esta aplicación, MapleSim se utilizó para investigar y comprender con precisión como se mueve un espejo con su montura, y cuantificar cualquier movimiento con acoplamiento cruzado que pueda ocurrir durante los ajustes del actuador. Esta información posicional puede utilizarse para mitigar errores, mejorar los resultados del trazado de rayos y ayudar en el alineamiento.
Un equipo de Canadian Light Source Inc. - una instalación líder mundial en investigación sobre sincotrón - utilizó MapleSim como herramienta de modelado para determinar el posicionamiento de una montura de espejo cinemática de seis puntales. El modelo que representa la montura cinemática de seis puntales se construyó fácilmente en MapleSim. Las escuaciones que describen el sistema se generaron automáticamente desde el modelo y fueron simplificadas por el motor simbólico de Maple. Los resultados del movimiento simulado de los actuadores de movimiento se utilizaron para obtener la posición y orientación inducida del espejo. Esta información fue entonces utilizada como entrada para el trazado de rayos. "MapleSim es una herramienta de simulación tremendamente útil para sistemas complejos y puede producir resultados rápidos con suficiente precisión para poder ser aplicable a monturas ópticas que requieren un posicionamiento preciso al nivel de micras," dijo Alan Duffy de Canadian Light Source.
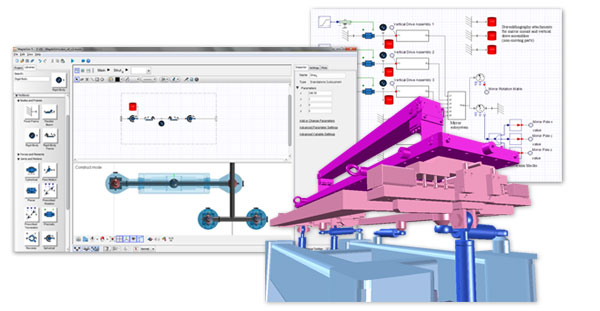
Figura 2: Vista del esquema 2D del subsistema de pilares (mitad superior), vista gráfica superior del sistema construido (mitad inferior), esquemático 2D del modelo completo de MapleSim con subsistemas para los seis pilares y el espejo, vista gráfica 3D del modelo de MapleSim en modo playback.
El movimiento de las monturas cinemáticas de seis pilares es de tal forma que el arco del moviento de los pilares individuales introduce errores coseno que causan el acoplamiento menor de diferentes ejes independientes. Como resultado, el movimiento en cualquier dirección puede causar ligeros movimientos en otra dirección y también alterar la orientación rotacional. Sin un medio para cuantificar apropiadamente estos cambios en posición y orientación, los resultados del trazado de rayos pueden no ser realmente precisos.
|
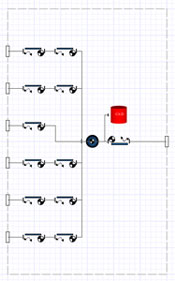
Figure 3: Vista del esquemático 2D del subsistema tanque del espejo con marcos de cuerpo rígido (i.e. desplazamientos) adheridos a un cuerpo rígido. |
MapleSim proporciona un medio de inferir la posición real y orientación de estas monturas cinemáticas de seis pilares, como función de los motores que controlan sus movimientos. Una comprensión más realista del modo de operación del sistema de seis pilares es útil para el alineamiento del haz y mejorar el rendimiento. El objetivo final del equipo de Canadian Light Source es crear un trazado de rayos x en tiempo real del lsistema que utiliza el sistema de control del haz para acceder a las posiciones de los componentes ópticos y entonces enviarlos como entrada a un programa de trazado de rayos x. El modelo de MapleSim se utilizó utilizando paletas específicas del dominio tales como bloques de señal o componentes multicuerpo. Los pilares se modelaron utilizando un cuerpo rígido 3D, dos marcos de cuerpo rígido, y dos juntas esféricas de la librería multicuerpo. También fue posible crear una animación del sistema en movimiento utilizando ficheros STL exportados desde un CAD. El motor simbólico de Maple se utilizó para realizar la simplificación del modelo, que permitió reducir las ecuaciones del sistema sin pérdida de fidelidad. MapleSim permitió reutilizar sistemas convirtiéndolos en subsistemas. El tanque del espejo se modeló como un cuerpo rígido con marcos de cuerpo rígido definiendo los desplazamientos desde el centro de masas a los puntos de conexión donde los pilares están adheridos (parte izquierda de Figura 3). Existe también un marco de cuerpo rígido adicional definiendo el desplazamiento del poste del espejo (parte derecha de Figura 3). Una aplicación inmediata del resultado es utilizar esta información posicional para mitigar los errores coseno y mejorar los resultados de trazado de rayos y asistir en el alineamiento del sistema óptico. Los resultados de la simulación se utilizaron para verificar la tabla proporcionada por el fabricante (que proporcionaba la posición del espejo y su orientación como función de las posiciónes del motor actuador) y ampliarla a posiciones del motor que no estaban incluidas. |
"MapleSim facilitó modelar el movimiento de un sistema complejo sin tener que emplear tiempo en derivar sus ecuaciones de movimiento", conluyó Alan Duffy. "Proporcionó resultados precisos, y simulaciones rápidas permitiéndonos ver cómo se movería el espejo de acuerdo con el movimiento de sus actuadoes. MapleSim es una herramienta extremadamente útil y potente y ha sido de gran ayuda."